

Intelligent obstacle avoidance method for robot based on three-dimensional laser
A robot intelligence, three-dimensional laser technology, applied in the field of robots, to achieve the effect of improving real-time performance and accuracy, and effectively avoiding obstacles
Inactive Publication Date: 2019-01-04
YIJIAHE TECH CO LTD
View PDF7 Cites 28 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0006] Purpose of the present invention: In order to solve the problem of 2D laser radar to scan the environment for obstacle avoidance, provide a robot intelligent obstacle avoidance method based on three-dimensional laser
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
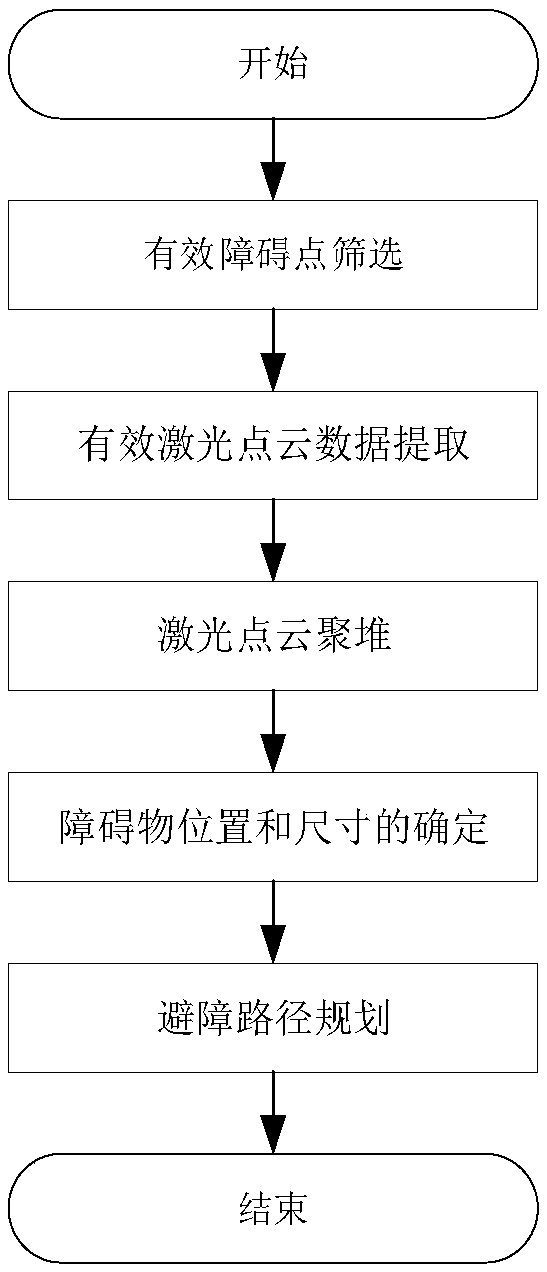
[0055] This embodiment introduces a robot intelligent obstacle avoidance method based on three-dimensional laser, the specific steps are as follows figure 1 Shown:
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
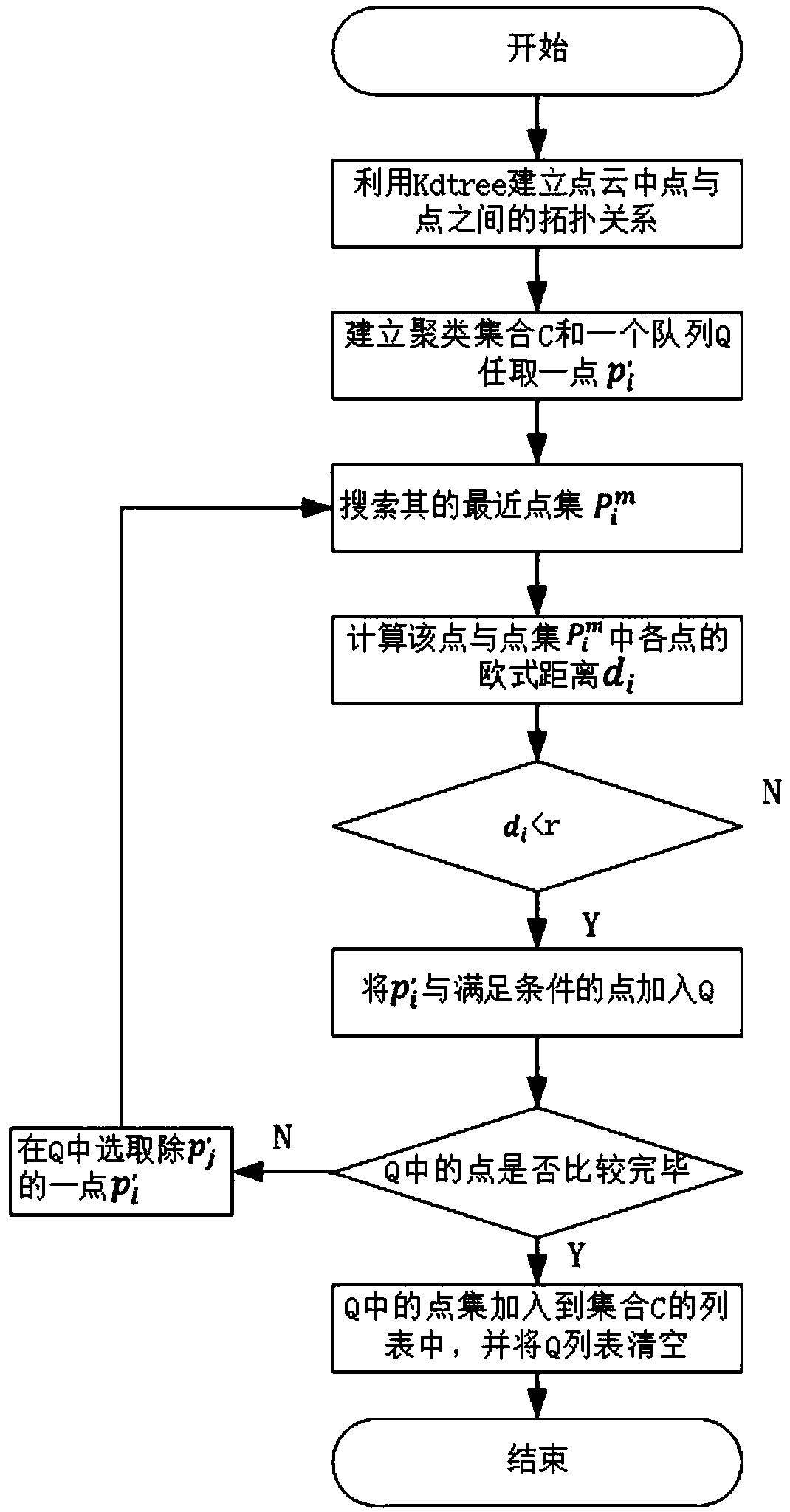
The invention provides an intelligent obstacle avoidance method for a robot based on three-dimensional laser, and relates to the field of robots. According to the invention, laser point cloud data ina three-dimensional laser plane emitted by a three-dimensional laser sensor is mapped into two-dimensional laser point cloud data, characteristic laser point cloud data corresponding to an obstacle isextracted by using the Euclidean clustering method, position and size information of the obstacle is calculated according to the extracted characteristic laser point cloud data, and finally the obstacle avoidance path of the robot is planned by using the cubic Bezier curve so as to realize effective obstacle avoidance of the robot. According to the obstacle avoidance method provided by the invention, the robot can obtain information of an unknown obstacle, and the timeliness and accuracy of obstacle avoidance navigation of the robot are improved.
Description
technical field [0001] The invention relates to the field of robots, in particular to a three-dimensional laser-based intelligent obstacle avoidance method for robots. Background technique [0002] Obstacle avoidance means that the mobile robot, according to the state information of the collected obstacles, senses the static and dynamic objects that hinder its passage through the sensor during the walking process, and effectively avoids obstacles according to a certain method, and finally reaches the target point. The basis for autonomous navigation. The necessary condition for obstacle avoidance and navigation is environmental perception. Obstacle avoidance in unknown or partially unknown environments requires sensors to obtain surrounding environment information, including information such as the size, shape, and position of obstacles. Therefore, sensor technology plays an important role in mobile robot avoidance. play a very important role in barriers. The sensors used ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G05D1/02
CPCG05D1/0238
Inventor林欢程敏王锋毛成林项导
OwnerYIJIAHE TECH CO LTD