

Control method for UAV landing and UAV
A control method and technology for unmanned aerial vehicles, applied in the field of unmanned aerial vehicles, can solve the problems of long recovery control distance, reducing the accuracy of guiding the unmanned aerial vehicle to fly to the capture net, and the lack of deceleration methods for the unmanned aerial vehicle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0027] An embodiment of the present invention provides a method for controlling the landing of a UAV, which can be applied to the landing and recovery of a fixed-wing UAV. The method for controlling the UAV landing provided by the present invention improves the accuracy of the UAV recovery through corresponding control operations during the UAV recovery process.
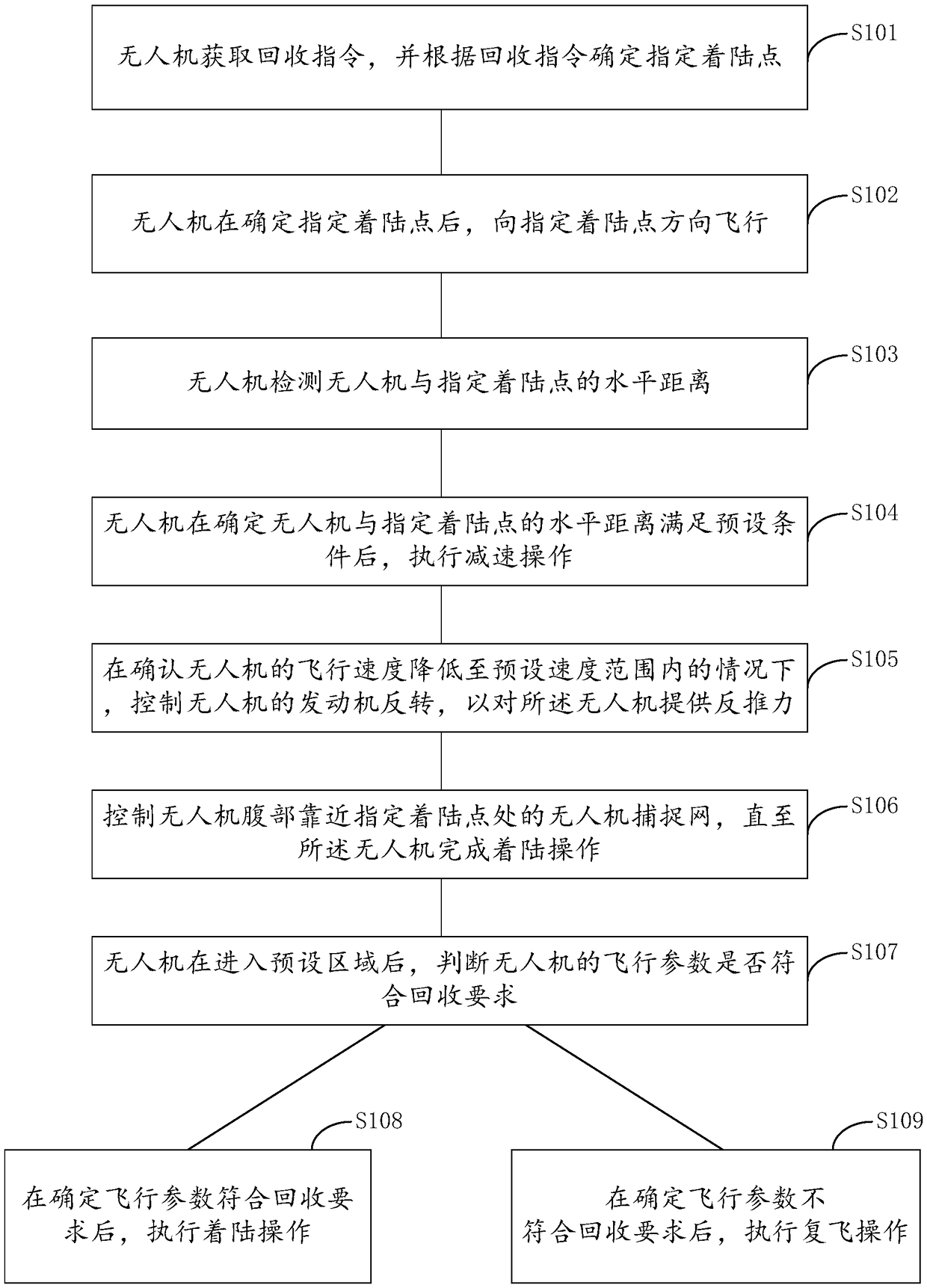
[0028] Such as figure 1 As shown, the control method of the UAV landing provided by the embodiment of the present invention includes:
[0029] S101. The drone acquires a recovery instruction, and determines a designated landing point according to the recovery instruction.
[0030] In an implementation manner, the UAV acquires the recovery instruction, which specifically includes: acquiring a ground image within a preset range below the UAV, and identifying a coded label in the ground image.
[0031] Wherein, the coding label is set at the position of the designated landing point.
[0032] Exemplarily, a high-defin...
Embodiment 2
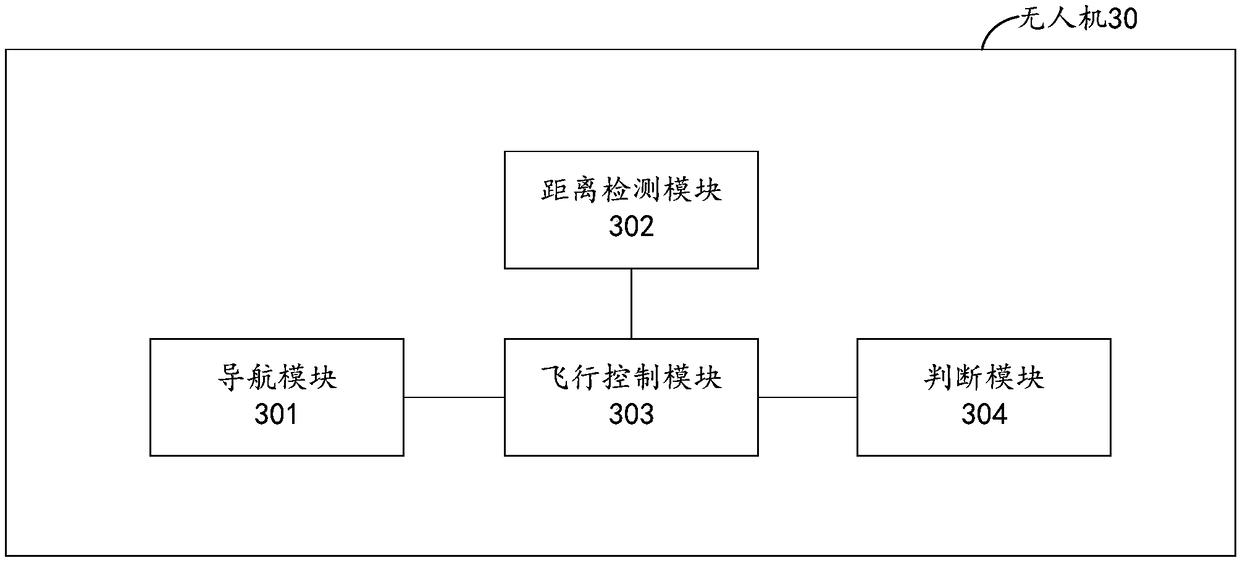
[0070] Based on the above method for controlling the landing of a drone, an embodiment of the present invention provides a drone 30 . Such as image 3 As shown, the UAV 30 includes: a navigation module 301, a distance detection module 302, a flight control module 303, and a judgment module 304, wherein:
[0071] A navigation module 301, configured to obtain a recovery instruction, and determine a designated landing point according to the recovery instruction;
[0072] A distance detection module 302, configured to detect the horizontal distance between the UAV and the designated landing point;
[0073] The flight control module 303 is also used to perform a deceleration operation after determining that the horizontal distance between the UAV and the designated landing point satisfies a preset condition;
[0074] The flight control module 303 is also used to control the reverse rotation of the engine of the UAV to provide reverse thrust to the UAV when it is determined that t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More