

Visual navigation method based on fast feature point extraction and mesh triangle constraint
A feature point extraction and triangle technology, applied in the field of visual navigation and image processing, can solve the problems of increasing mismatching, redundant feature points, feature point aggregation, etc., and achieve the effect of improving matching speed and accuracy and reducing redundancy
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
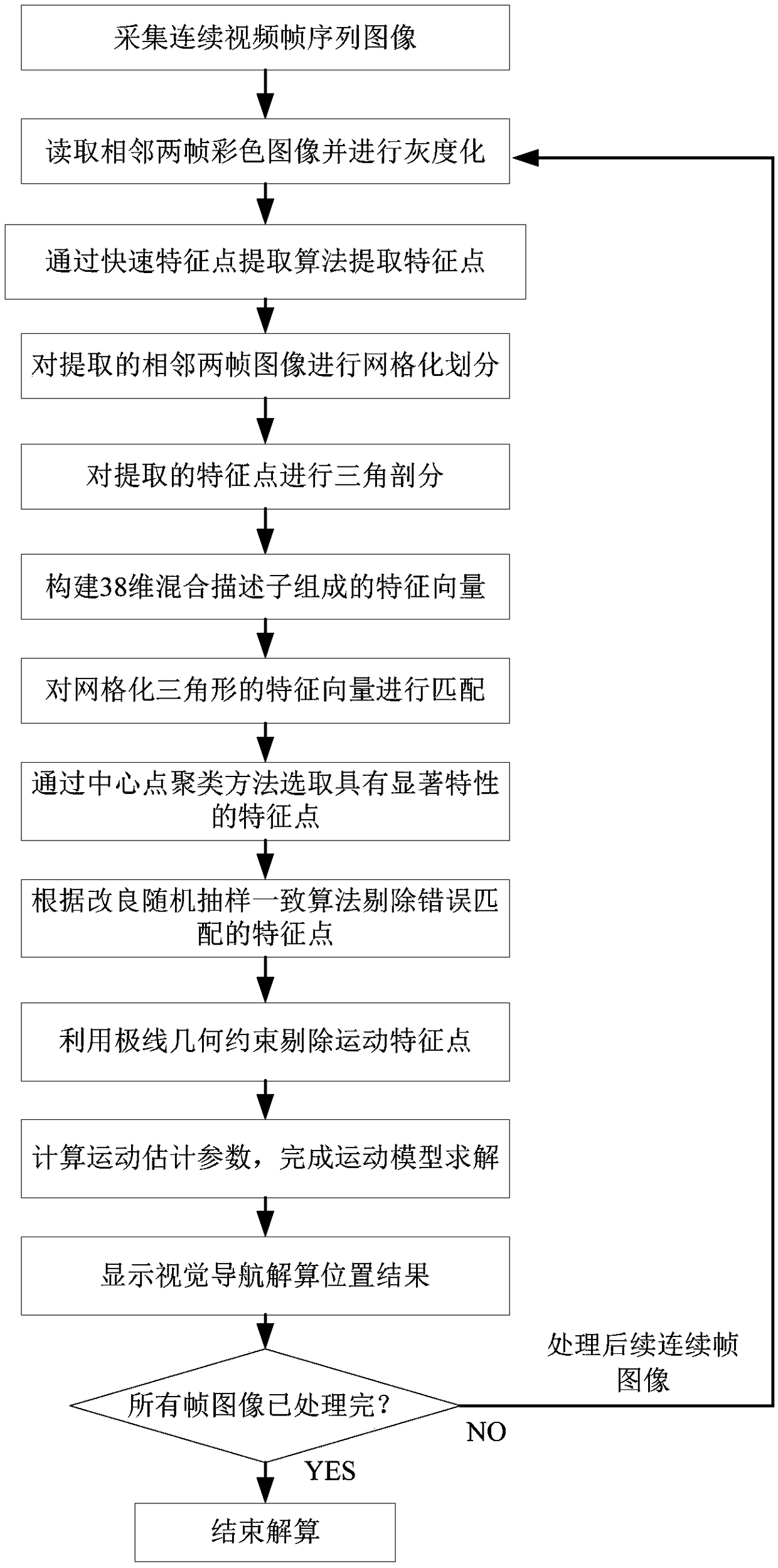
[0064] Such as figure 1 As shown, the present invention discloses a visual navigation method based on fast feature point extraction and meshed triangle constraints, including the following steps:
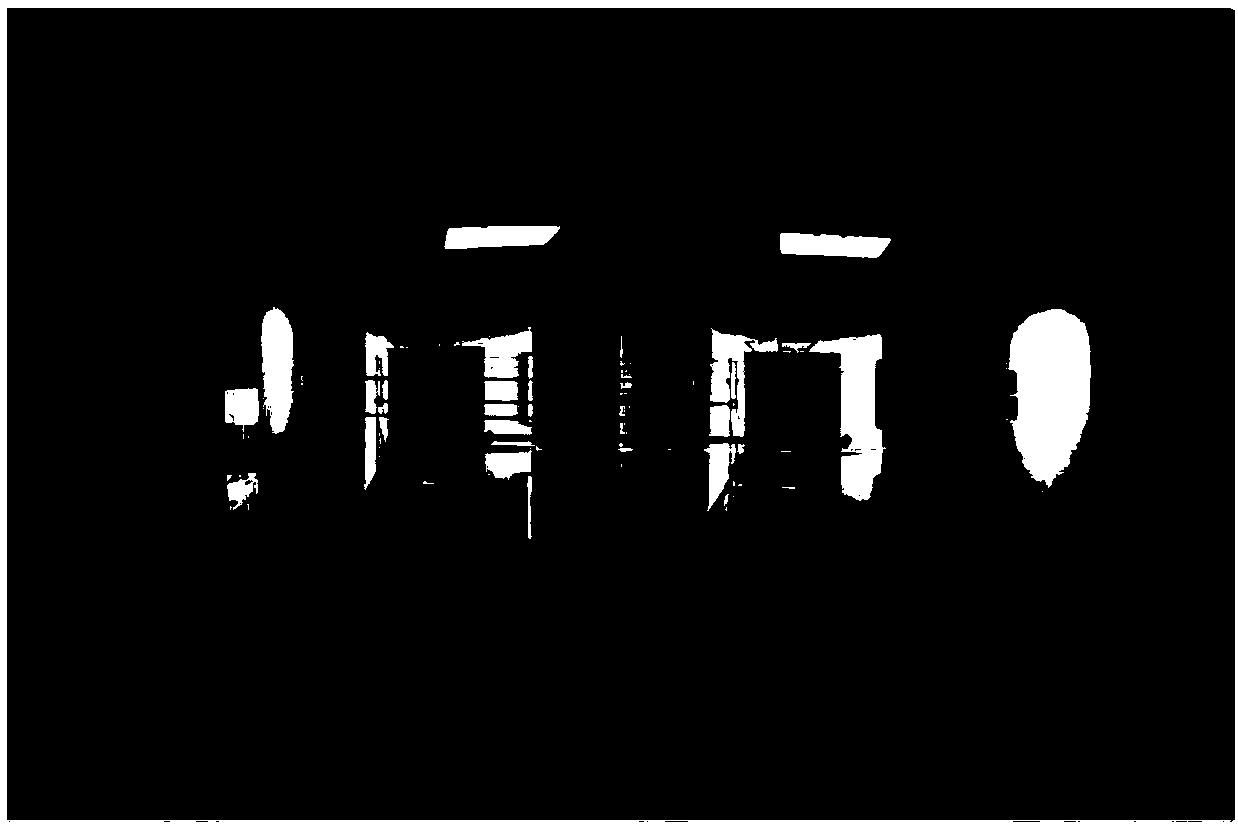
[0065] Step 1: Collect continuous video frame sequence images, read two adjacent frames of color images and perform grayscale processing, extract feature points in adjacent two frames of images through a fast feature point extraction algorithm, and pre-match the extracted feature points ;Such as figure 2 Shown is a graph of the feature point extraction result of the fast feature point extraction algorithm in the present invention.
[0066] Step 2: Carry out grid division for the extracted two adjacent frames of images, use the Delaunay algorithm to triangulate the extracted feature points in each grid, and eliminate excessive side length or If the triang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
- IPC
- G06T7/73; G06K9/46; G06K9/62
- CPC
- G06T7/73; G06T2207/10016; G06V10/443; G06V10/462; G06F18/23213
- Inventors
- 谢非; 黄天胤