Building group orientated unmanned aerial vehicle autonomous navigation method
A technology for autonomous navigation and building complexes, which is applied in directions such as navigation, mapping and navigation, and radio wave measurement systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
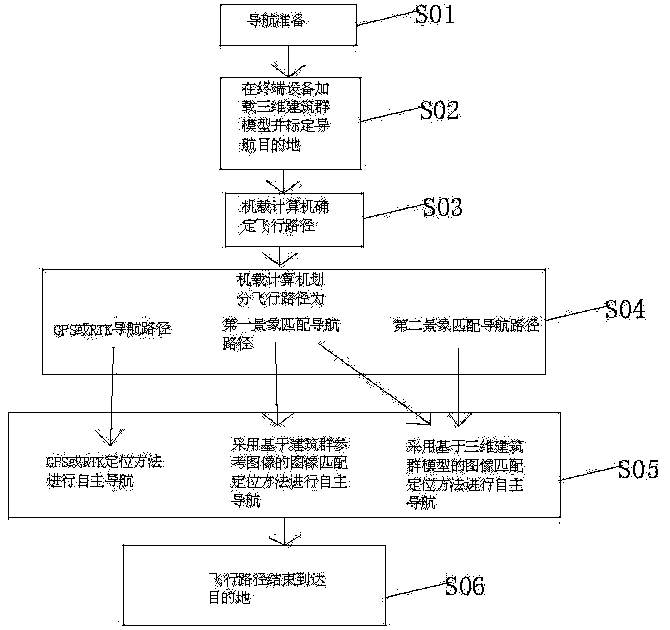
[0028] A self-navigation method for UAVs oriented to buildings
[0029] S01, navigation preparation, the navigation preparation includes the following content
[0030] I. Obtain the three-dimensional point cloud of the terrain through three-dimensional laser scanning, and then generate a three-dimensional building group model through the modeling platform. The three-dimensional building group model adopts a triangular mesh model;
[0031] II. Building group reference image collection, the building group reference image collection steps are as follows:
[0032] (1) Cameras are installed below and on the side of the UAV. When the UAV is navigating and flying, the UAV uses the sensor to measure the height of the UAV and m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com