

Multi-behavior fused enzyme numerical membrane control method for mobile robot in unknown environment
A mobile robot, control method technology, applied in non-electric variable control, control/regulation system, two-dimensional position/channel control and other directions, to achieve the effect of solving deadlock problems and detour problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings.
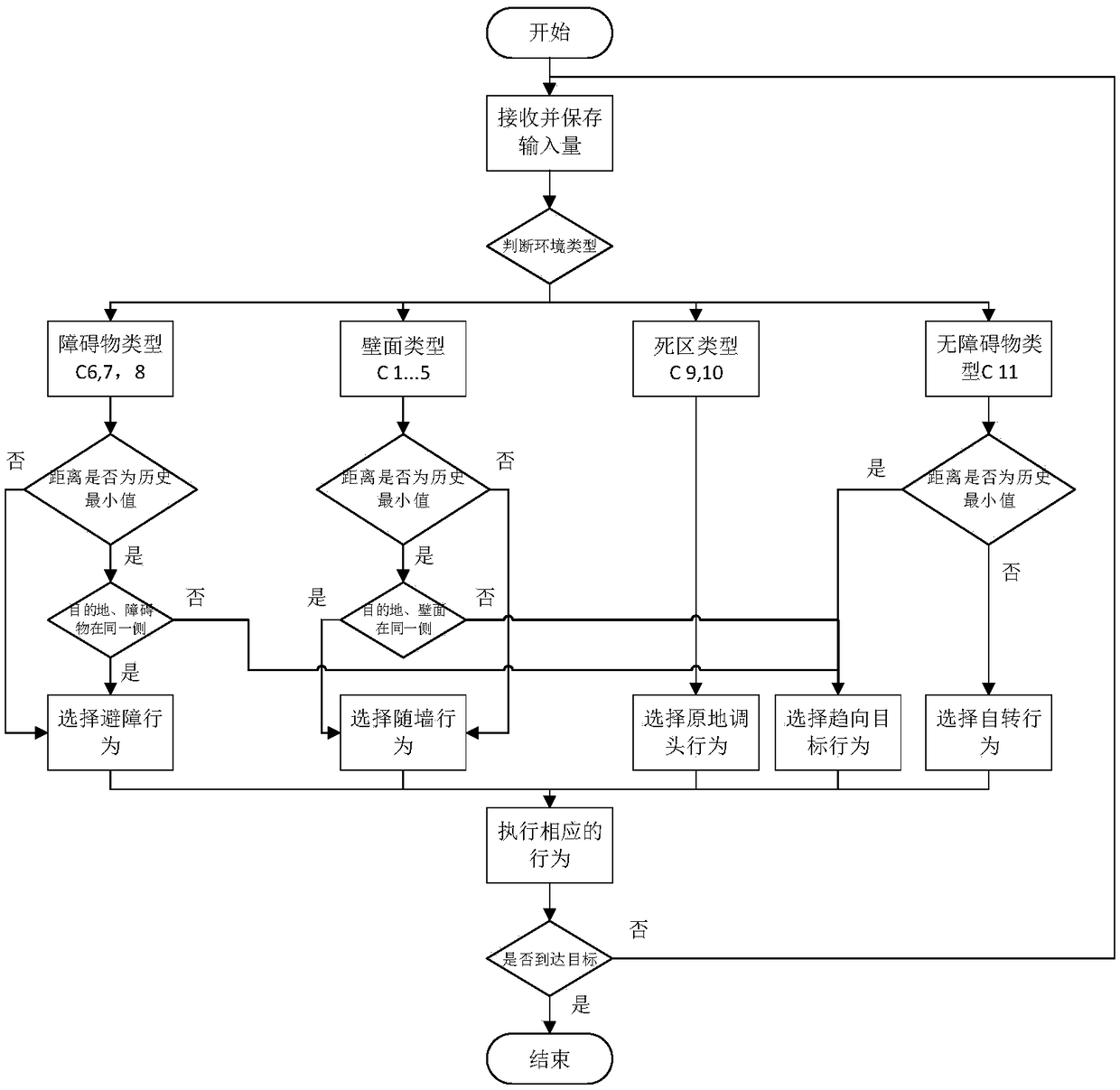
[0035] The numerical membrane control flow chart of the multi-behavior fusion enzyme is as follows: figure 1 .
[0036] The specific related technology that the present invention adopts is as follows:
[0037] 1) Put the mobile robot in an unknown environment with the unknown environment and robot target as input, given the target point to be reached by the robot (x g ,y g ). According to the distance formula Calculate the distance CurDist between the target and the mobile robot and calculate the angle Angle of the target relative to the forward direction of the robot according to the angle calculation formula (take the right side of the forward direction of the robot as the positive direction).
[0038] 2) Control of the mobile robot
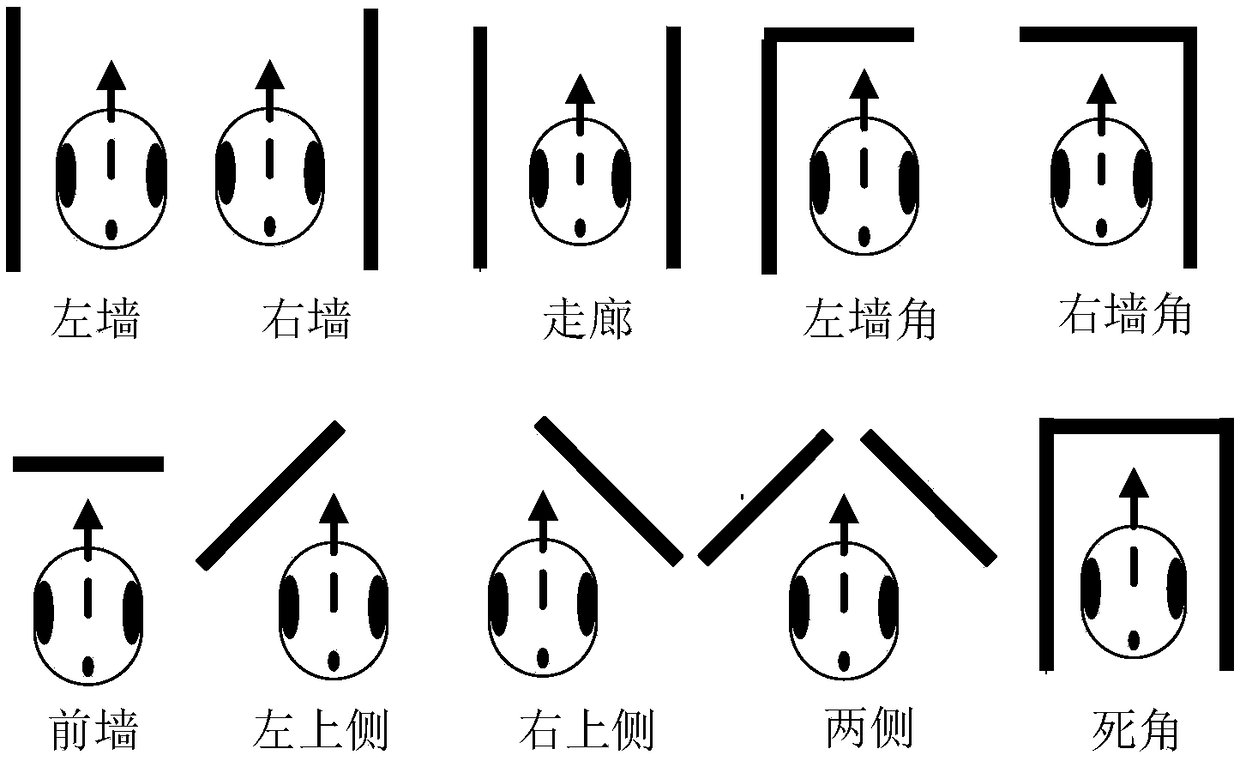
[0039] a) Acquisition and determination of the environment where the mobile robot is located
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More