

Transmission structure of bionic manipulator finger and bionic manipulator
A technology of bionic machinery and transmission structure, applied in the field of grasping equipment, can solve the problems of small grasping force, low degree of freedom, and non-self-locking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
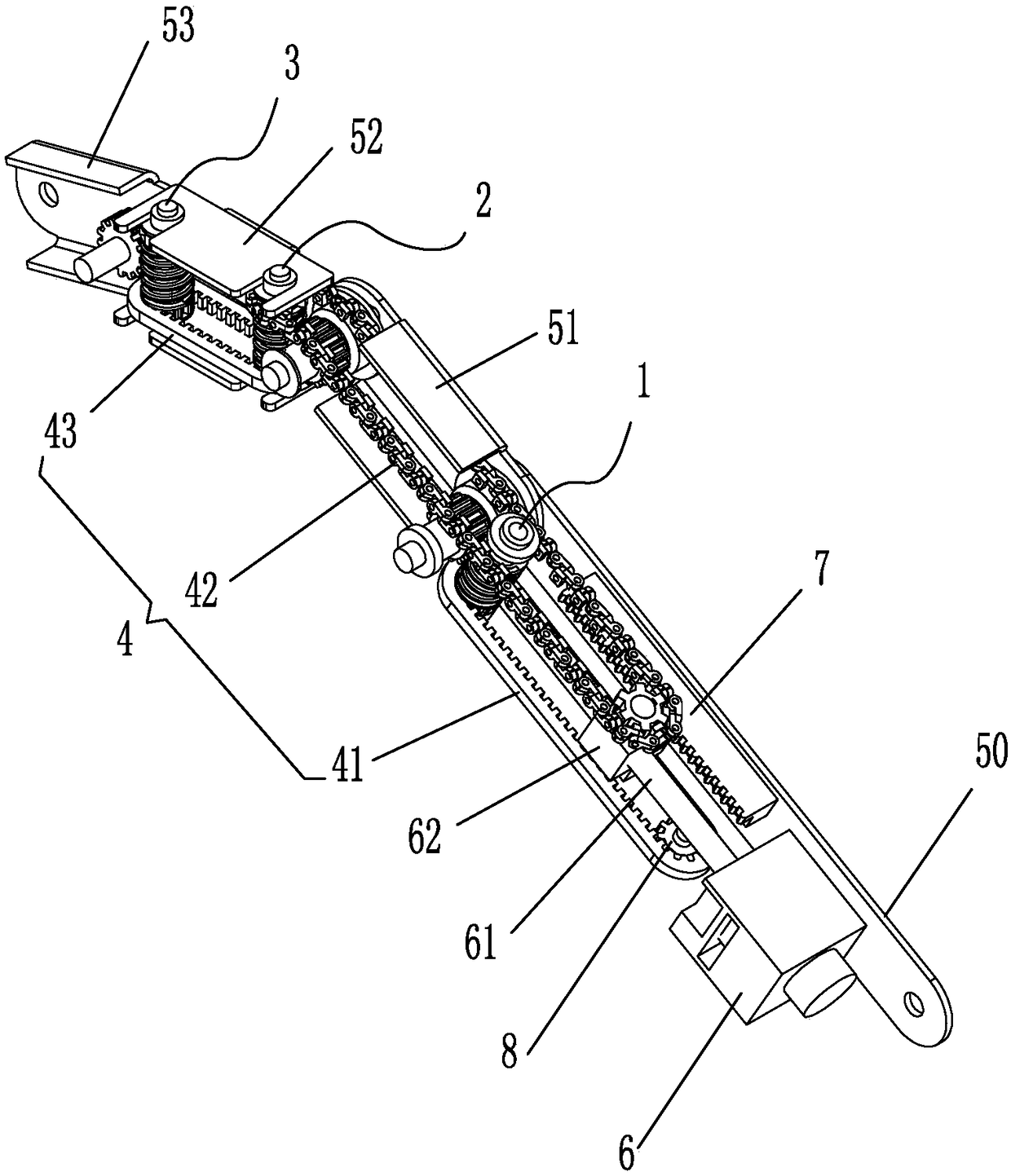
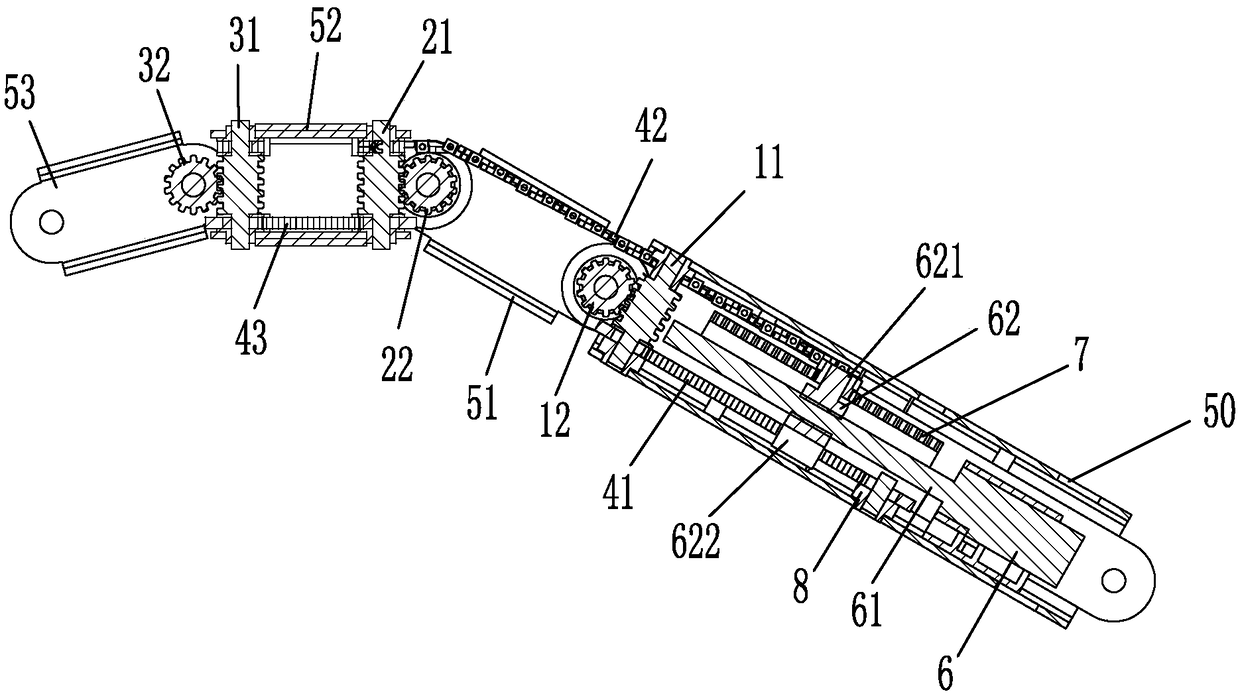
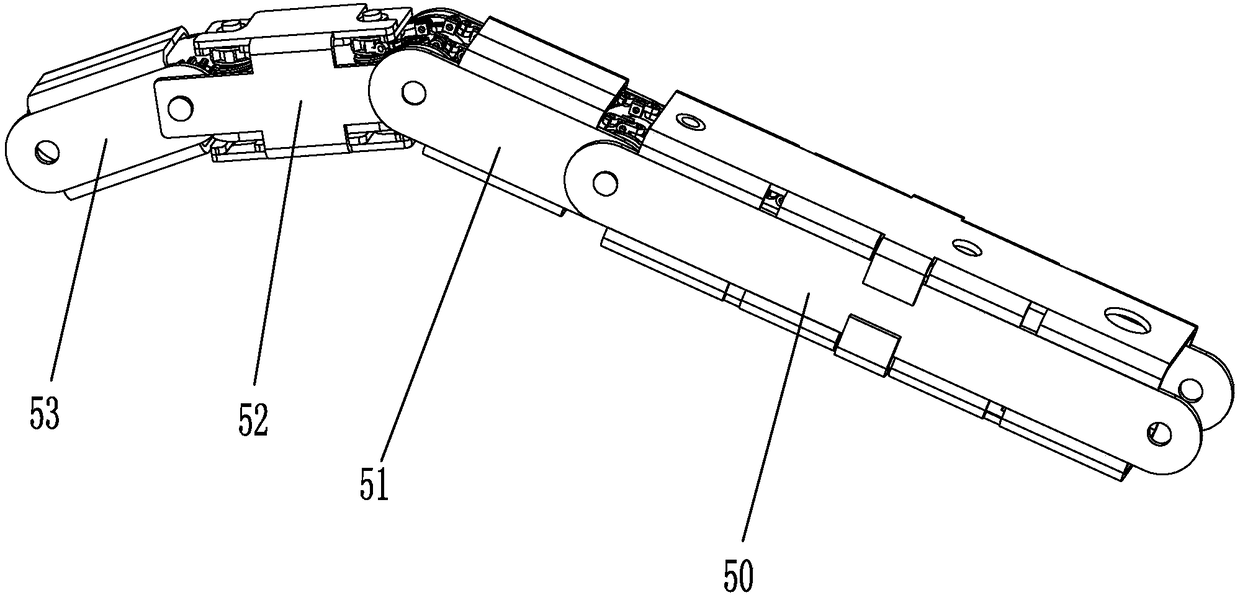
[0069] Such as Figure 1 to Figure 3 As shown, a transmission structure of a bionic mechanical finger, each joint in the transmission structure is provided with a group of worm gears driven by a chain belt as a joint movement mechanism; the transmission structure includes a finger outer frame, a transmission mechanism and adjustment unit;
[0070] The finger outer frame includes an adjustment unit outer frame 50, a first joint frame body 51, a second joint frame body 52 and a third joint frame body 53; the front end of the adjustment unit outer frame body 50 is located behind the first joint frame body 51 end and is hingedly connected with the rear end of the first joint frame body 51, and the front end of the first joint frame body 51 is located at the outside of the rear end of the second joint frame body 52 and is hingedly connected with the rear end of the second joint frame body 52 , the front end of the second joint frame body 52 is located outside the rear end of the t...
Embodiment 2
[0085] Such as Figure 14 As shown, a bionic manipulator includes a palm frame 54, five bionic mechanical fingers are installed on the palm frame 54, wherein four bionic mechanical fingers are transmission structures of the bionic mechanical fingers described in Embodiment 1; There is a bionic robotic finger for the thumb (see Figure 15 ), the thumb includes a thumb outer frame, a thumb transmission mechanism and a thumb adjustment unit;
[0086] The thumb outer frame includes an adjustment unit outer frame 50, a second joint frame body 52 and a third joint frame body 53;
[0087] The front end of the adjustment unit outer frame 50 is hingedly connected to the rear end of the second joint frame body 52, and the front end of the second joint frame body 52 is hingedly connected to the rear end of the third joint frame body 53; The front end of the frame body 53 is used as a free end;
[0088] The thumb adjustment unit includes a motor 6, a screw mandrel 61, a wire sleeve sli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More