

Two-wheeled robot motion control system and method based on complementary filtering
A technology of robot movement and complementary filtering, which is applied in general control systems, control/regulation systems, non-electric variable control, etc., to achieve fast and convenient manual intervention capabilities and increase manual intervention capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
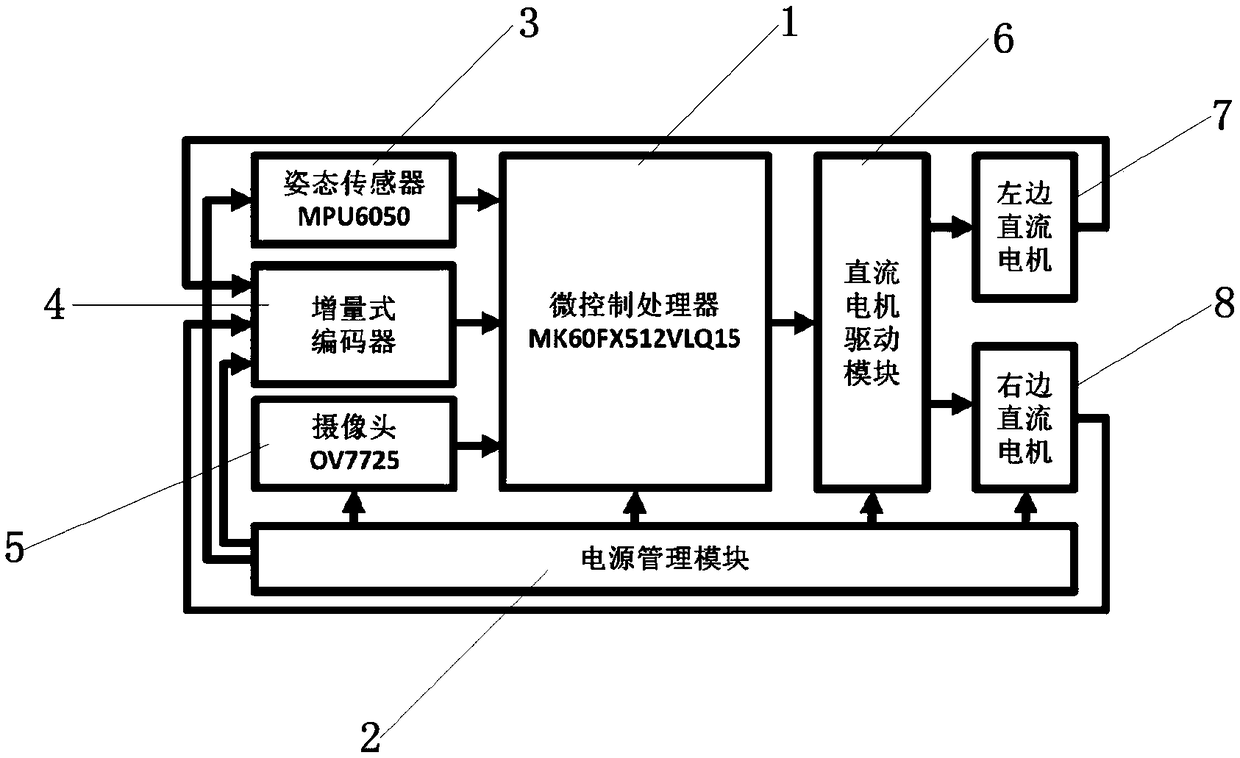
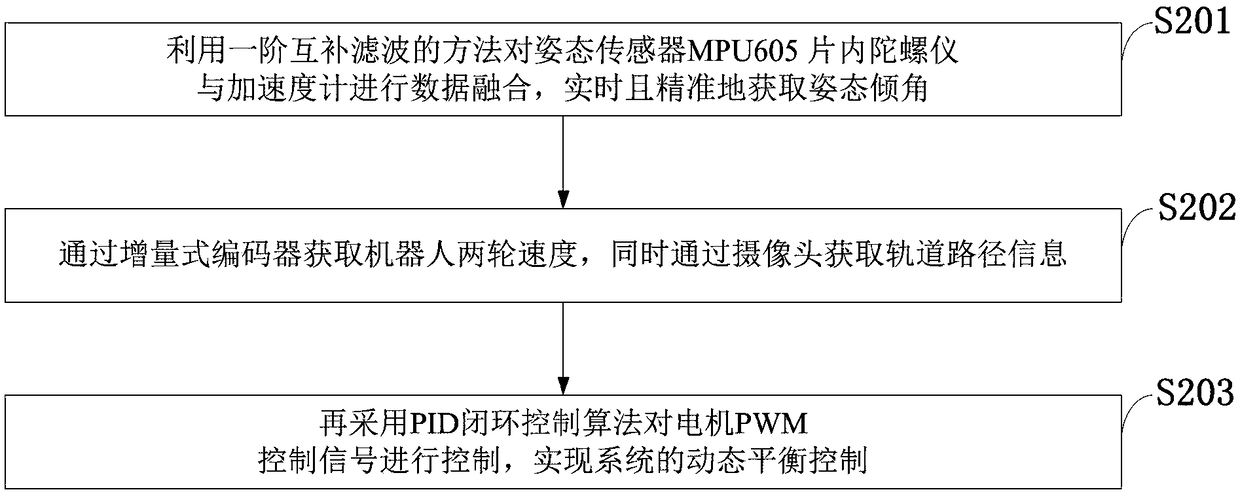
[0061] The present invention is based on the microcontroller MK60FX512VLQ15 to realize the monorail walking two-wheeled robot motion control system; firstly, the MPU6050 sensor is used to detect the attitude angle of the robot to realize the balance control, and at the same time, the speed of the robot is obtained through the incremental encoder to realize the speed control; secondly, through The camera collects track images to realize direction control. The first-order complementary filtering algorithm is used to fuse the data of the gyroscope and the accelerometer, and the motor is controlled through the PID closed-loop c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More