Omni-directional moving chassis of wheeled robot
A wheeled robot, omnidirectional moving technology, applied in the direction of manipulator, motion deposition, power device, etc., can solve the problems of poor protection ability, complex driving and steering mechanical structure, weak terrain adaptability, etc., and achieve strong terrain adaptability. , Simple structure, stable driving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
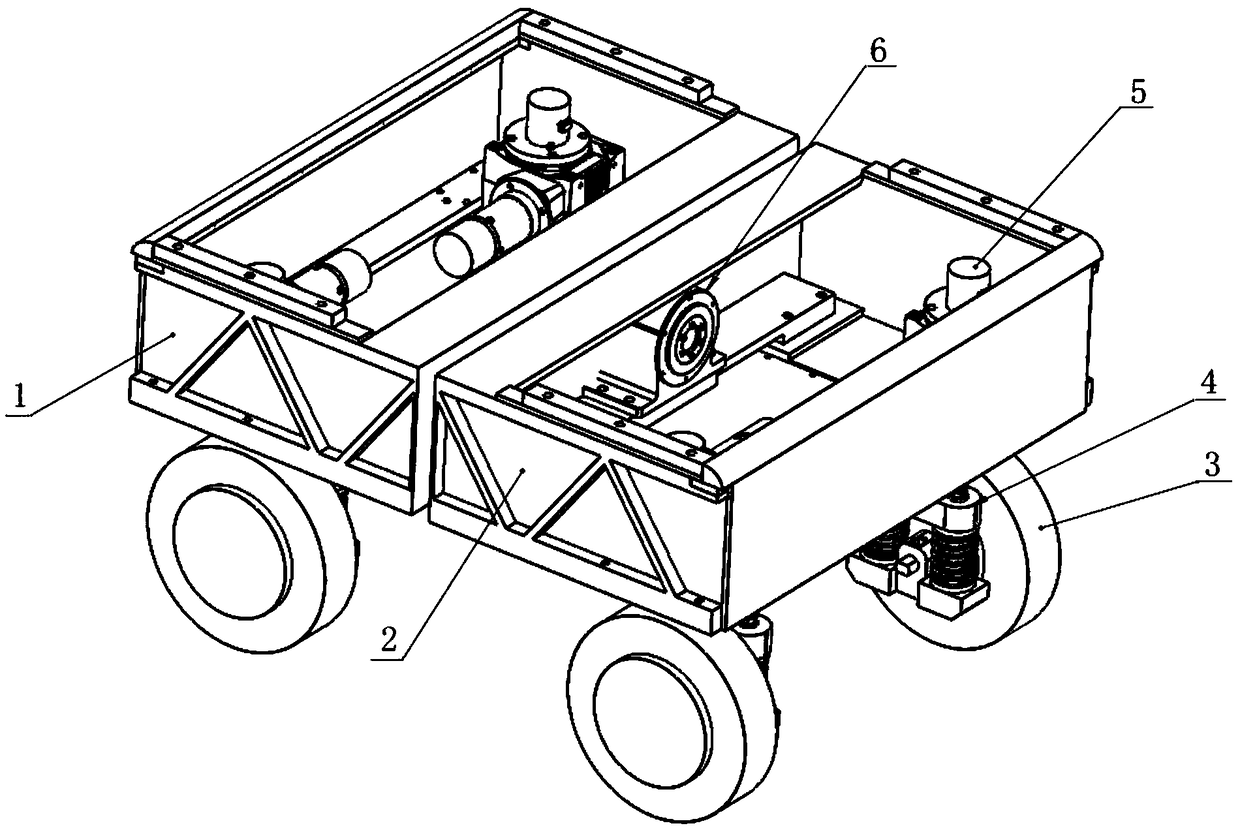
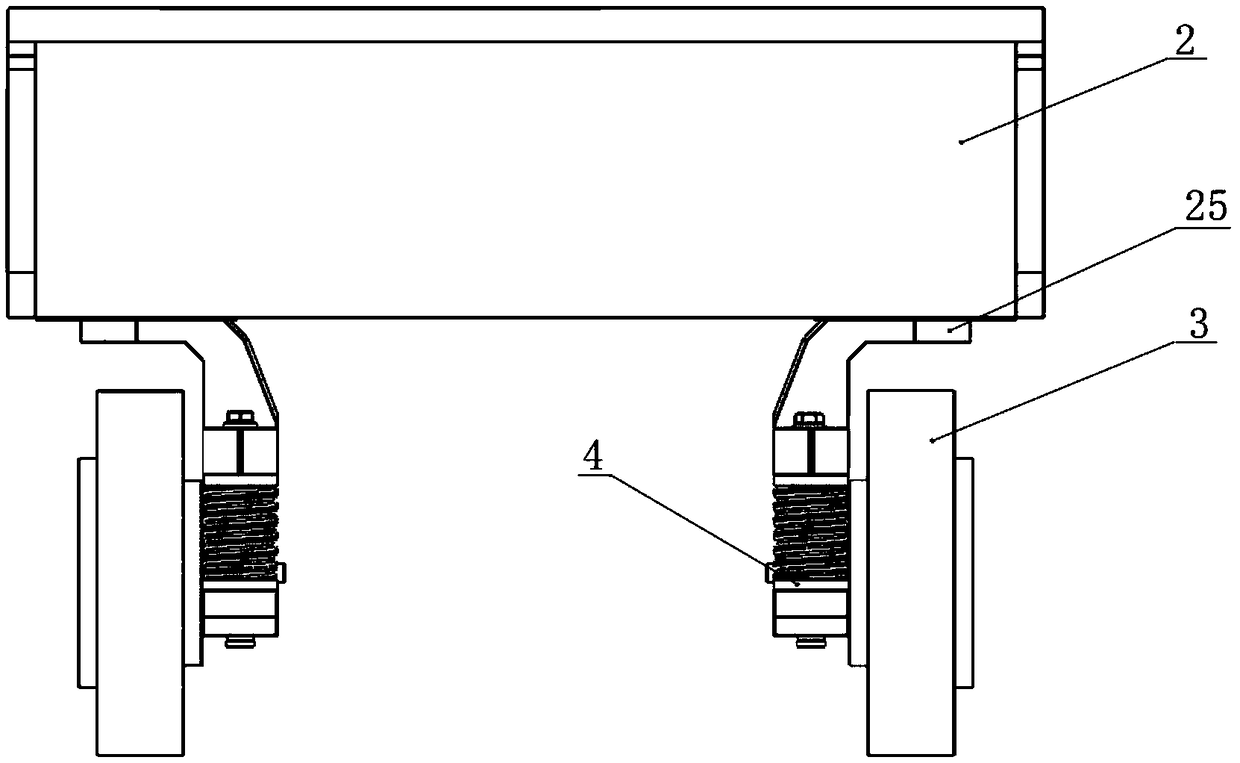
[0024] Such as Figure 1-2 As shown, the omnidirectional mobile chassis of a wheeled robot provided by the present invention includes a rear box 1, a front box 2, a guide drive wheel 5 and a hinged joint 6, wherein the rear box 1 and the front box 2 are connected through the hinged joint 6 connection, the bottoms of the rear box body 1 and the front box body 2 are all provided with two guide drive wheels 5.
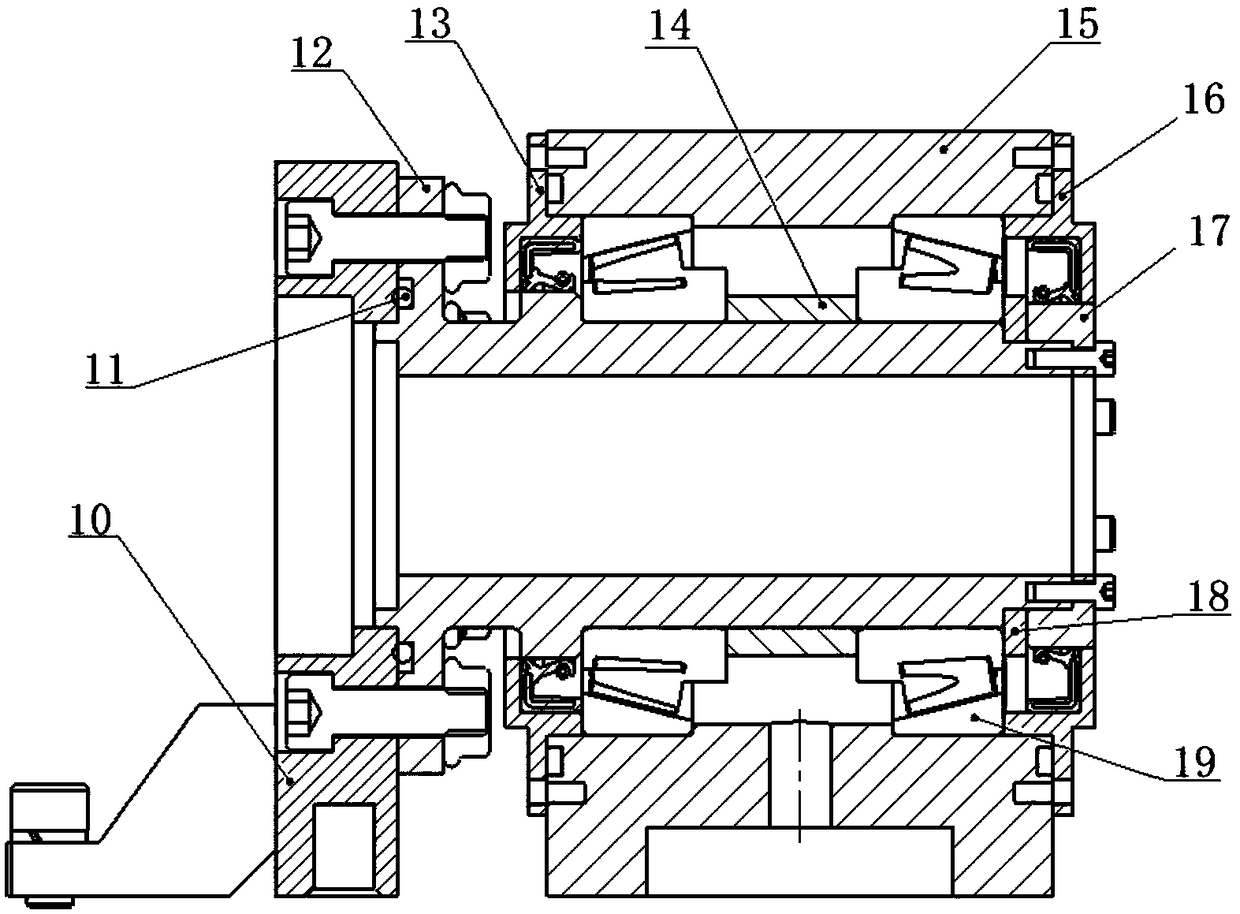
[0025] Such as image 3 As shown, the hinge joint 6 includes a front support 10, a hollow flange shaft 12, a rear support 15 and a bearing assembly, wherein the front support 10 and the rear support 15 are respectively connected with the front box body 2 and the rear box body 1 by screws , the front support 10 is fixedly connected to one en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com