

Multi-constraint attitude maneuver optimization method for spacecraft based on rotating path mass
A path quality, attitude maneuvering technology, applied in attitude control, instrumentation, adaptive control and other directions, can solve problems such as path unwinding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
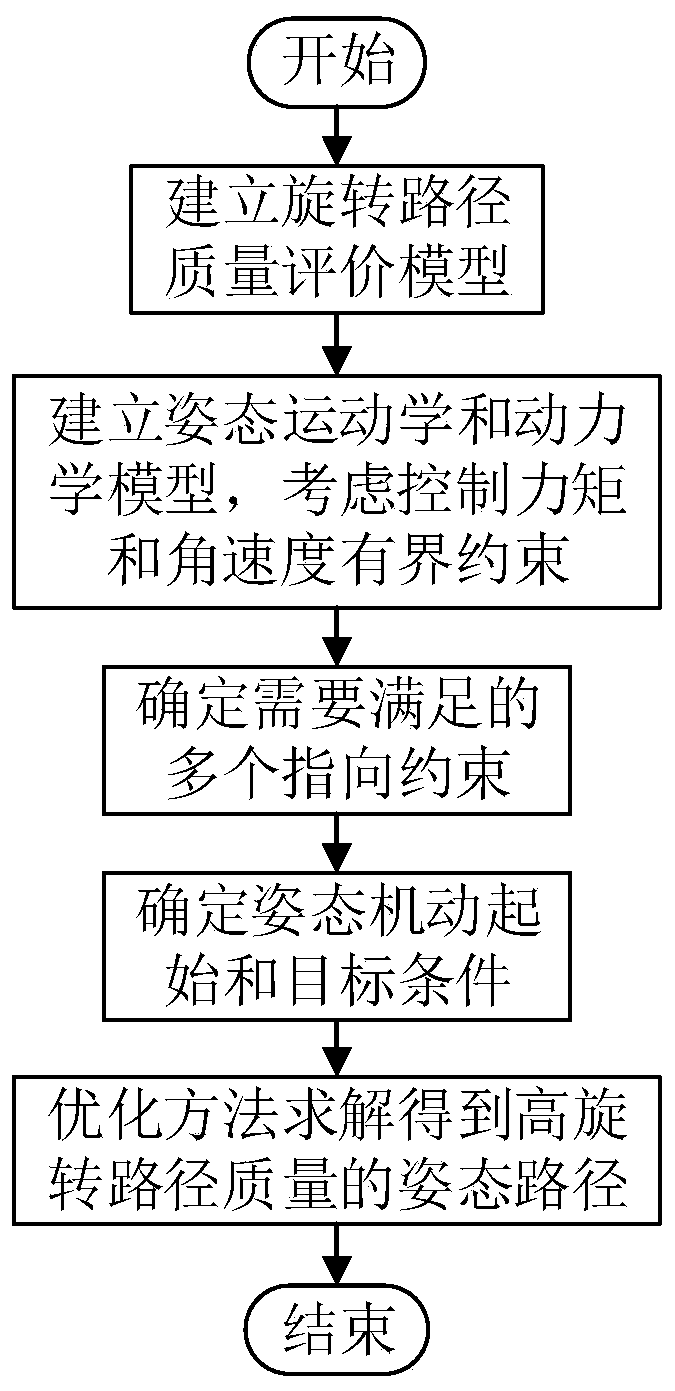
[0049] Such as figure 1 As shown, the specific implementation steps of the spacecraft multi-constraint attitude maneuver optimization method based on the rotation path quality disclosed in this embodiment are as follows:
[0050] Step 1: Establish a rotation path quality evaluation model. In this embodiment, a discrete form is adopted, that is, formula (5) is used to evaluate the rotation path quality. Set the number of nodes to 52, that is, N=51, then the quality of the rotation path is
[0051]
[0052] Step 2: Establish the attitude kinematics and dynamics model of the spacecraft, considering the bounded constraints of the control moment and angular velocity. In this embodiment, the inertia matrix of the spacecraft and the bounded constraints of the control torque and angular velocity are shown in Table 1.
[0053] Table 1 Inertia matrix of spacecraft and bounded constraints on control torque and angular velocity
[0054]
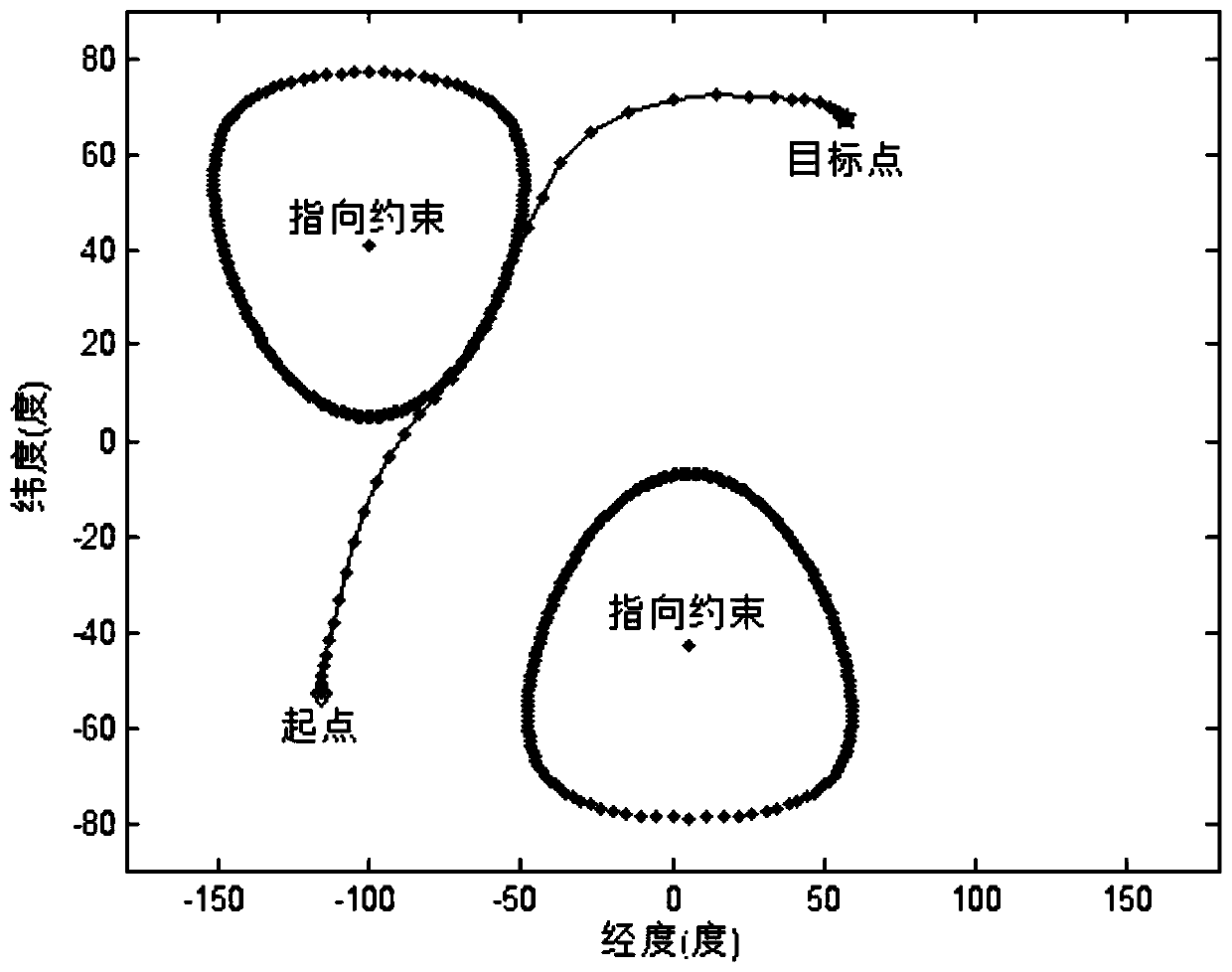
[0055] Step 3: Determine multiple pointi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More