

Trajectory tracking control method of underwater inspection robot
An inspection robot and trajectory tracking technology, applied in three-dimensional position/channel control, etc., can solve the problems of not considering the lag between the real trajectory and the expected trajectory, energy consumption of trajectory tracking, uncertain model parameters, and high complexity of the control law. The effect of smooth and stable trajectory tracking control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
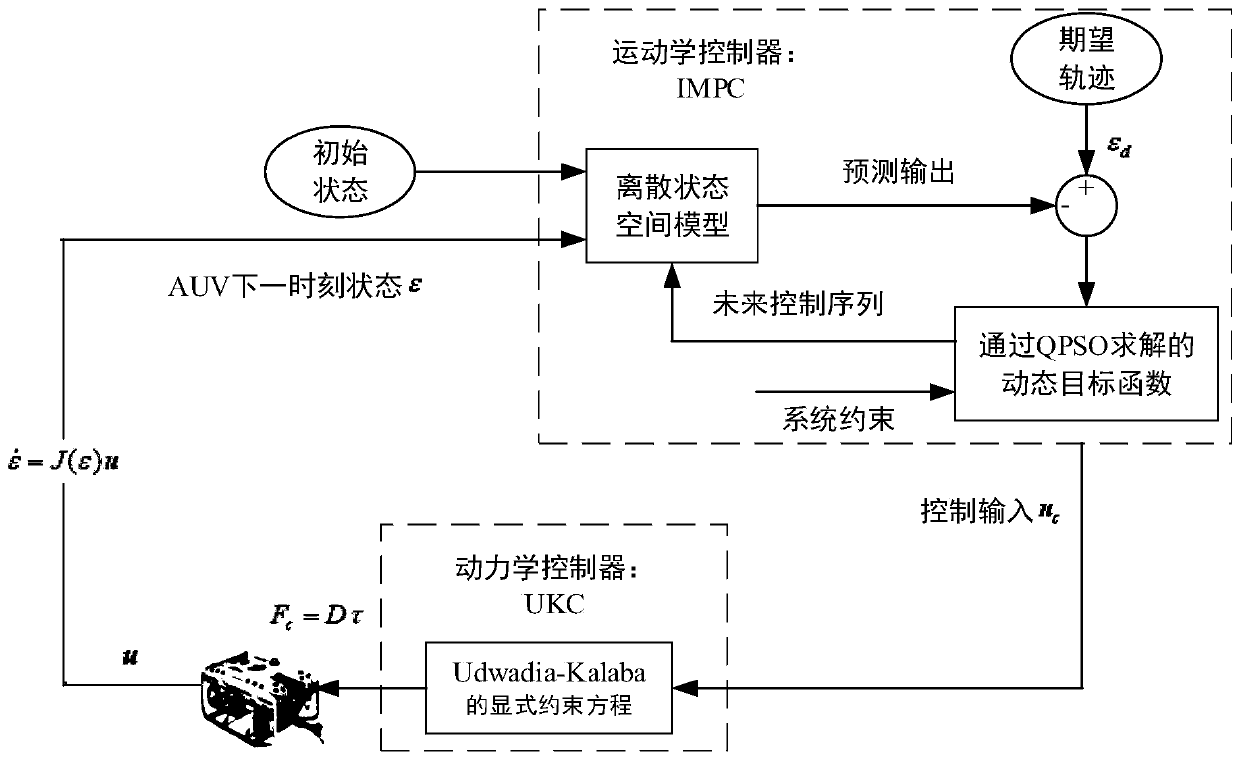
[0072] Around the content of the invention, specific embodiments of the present invention (such as figure 1 shown) as follows:
[0073] (1), preset reference trajectory for underwater robot trajectory tracking
[0074] The reference trajectory uses the navigation path planning algorithm to obtain the optimal path from the starting point to the target point, which is used as the preset reference trajectory for robot trajectory tracking;
[0075] (2), Combining the reference trajectory and the kinematics model to design the trajectory tracking kinematics controller
[0076] (2a). Establish a discrete state-space model for trajectory tracking in combination with the reference trajectory and kinematic equations. The specific algorithm is as follows:
[0077] The trajectory tracking control system of the underwater inspection robot is regarded as an input quantity u=[u v w q r] T And state quantity ε=[x y z θ ψ] T The control system, whose kinematic equation is expressed as F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More