

Interactive extraction method of left and right lane contours based on laser point cloud
A technology of laser point cloud and extraction method, which is applied in image data processing, instrumentation, calculation, etc., can solve the problems of accuracy loss, inability to bend, and the interval of collected shape points is uncertain, so as to avoid the problem of accuracy loss and ensure high efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
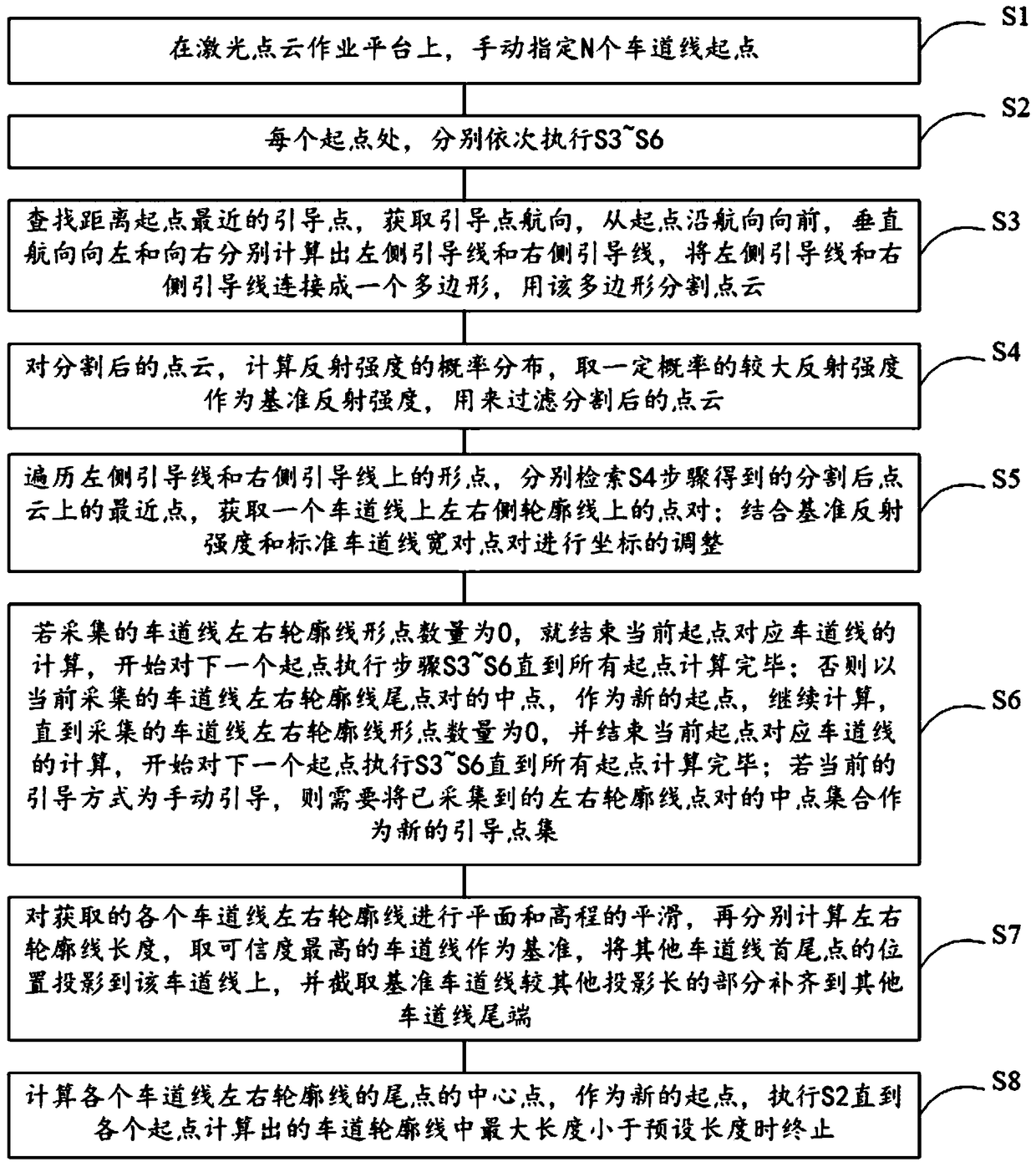
[0053] Such as Figures 1 to 7 As shown, a method for interactively extracting left and right contour lines of lane lines based on laser point cloud, which includes the following steps:
[0054] S1. On the laser point cloud operation platform, manually specify the starting point of N lane lines, N>=1, and select manual guided collection or trajectory guided collection; when selecting trajectory guidance, the source data needs to be accompanied by trajectory data matching the point cloud as Guidance point set; when manual guidance collection is selected, another guidance point along the extension direction of the lane line needs to be input;
[0055] S2. At each starting point, respectively execute S3-S6 in sequence;
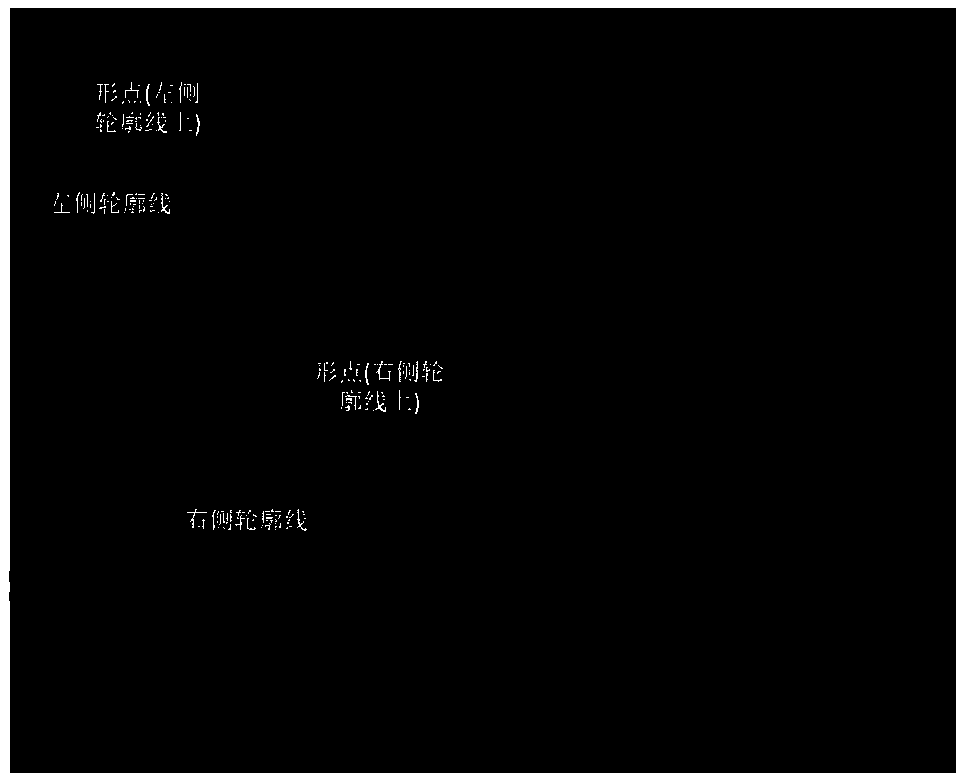
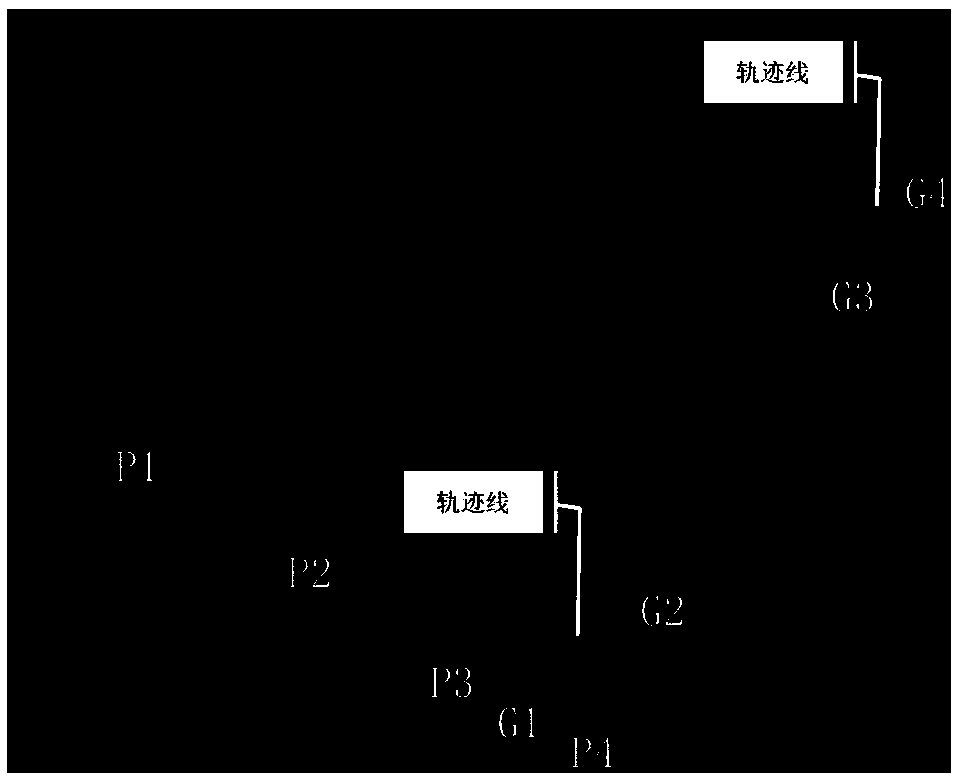
[0056] S3. Find the guide point closest to the starting point, obtain the course of the guide point, move forward along the course from the starting point, and calculate the left guide line and the right guide line respectively from the vertical course to the le...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More