

Driving device for discrete rotation of robot double freedom joints
A technology of driving device and degree of freedom, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of complex robot structure and high energy consumption, and achieve the effect of simple and compact structure, saving energy and space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
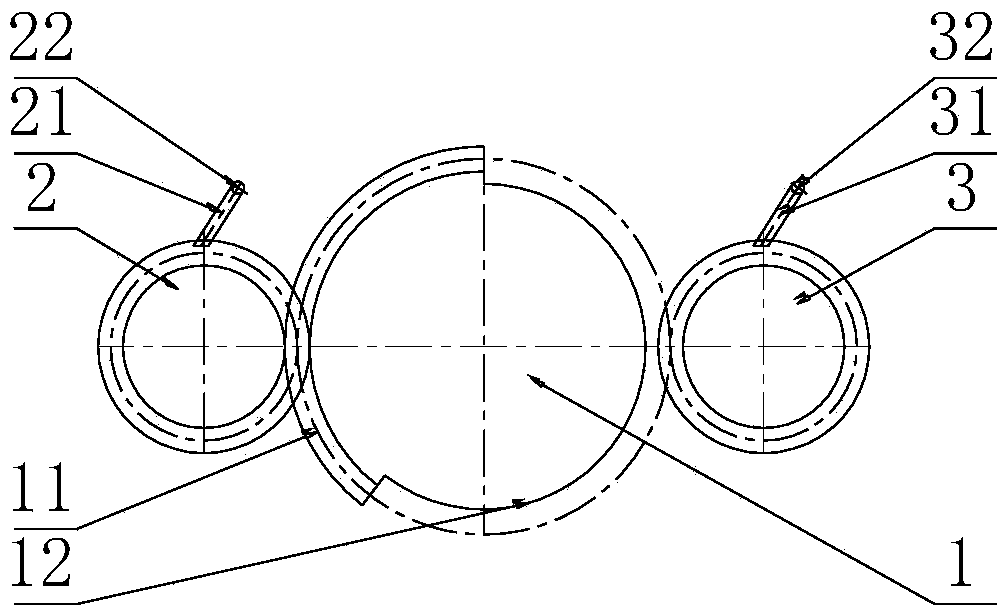
[0015] see figure 1 As shown, a robot dual-degree-of-freedom joint discrete rotation drive device of the present invention includes a special-shaped gear 1, a pinion A2 and a pinion B3 that are externally meshed with the special-shaped gear 1 .
[0016] see figure 1 As shown, the circumference of the special-shaped gear 1 is composed of meshing teeth 11 and a smooth surface 12. The meshing teeth 11 mesh with the pinion A2 and pinion B3 for transmission, and the minimum distance between the smooth surface 12 and the pinion A2 and pinion B3 is not less than 2 cm. .
[0017] see figure 1 As shown, the tooth groove of the pinion A2 is equipped with a push rod A21 that allows it to rotate in one direction, and the other end of the push rod 21 is installed on the equipment rack with a hinge A22; To the push rod B31 that rotates, the oth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More