

All-terrain multifunctional obstacle-crossing rescue robot
A rescue robot and multi-functional technology, applied in the field of robot emergency rescue, can solve problems such as difficult and efficient operations, low steering precision, and limited obstacle-crossing performance, and achieve the effects of strong operation ability, improved work efficiency, and high degree of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0053] Embodiment 1 An all-terrain multifunctional obstacle-surpassing rescue robot
[0054] The technical scheme of the present invention is described in detail below:
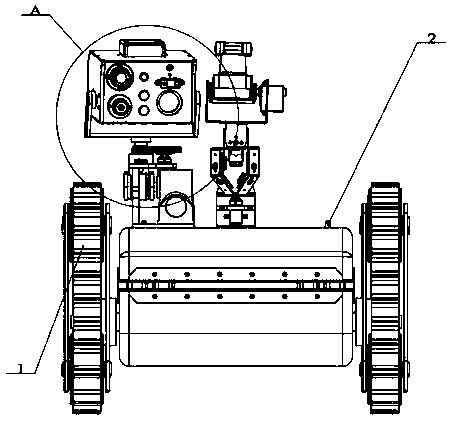
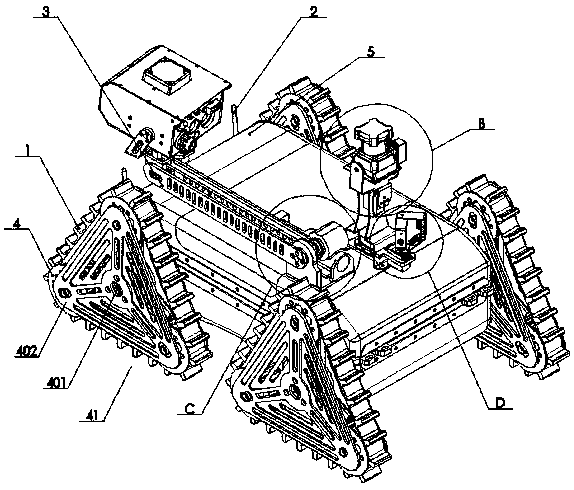
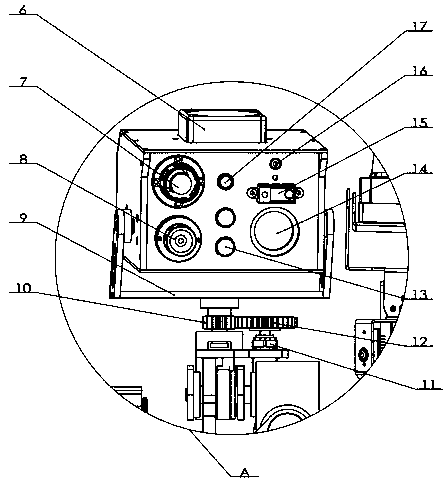
[0055] An all-terrain multifunctional obstacle-crossing rescue robot, comprising a car body 5, a crawler walking mechanism 41 arranged on the left and right sides of the car body 5, and a sensing device for obtaining three-dimensional map information of the robot's external environment and possible life body data, And the controller connected with the sensing device and used for data processing and controlling the movement of the robot; the sensing device includes a laser radar scanning system located on the top of the car body 5 and an infrared temperature measurement system located in front of the laser radar scanning system.
[0056] The lidar scanning system is located in the front center of the top of the car body 5, supported by the lower bracket 21 of the lidar and the upper bracket 19 of the lidar as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More