

Artificial fish swarm algorithm optimized volume particle filtering navigation method
A technology of artificial fish swarm algorithm and particle filter, which is applied in the direction of navigation calculation tools, calculation, calculation models, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0066] A preferred embodiment of the present invention is given below, and will be described with reference to the accompanying drawings and an example of an autonomous underwater vehicle (Autonomous Unmanned Vehicle, ie AUV) sea trial.
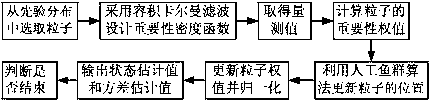
[0067] as attached figure 1As shown, the volume particle filter method (Improved Cubature Particle Filter, ICPF for short) of a kind of artificial fish swarm algorithm optimization provided by the present invention is realized through the following steps:
[0068] (1) Select AUV motion model
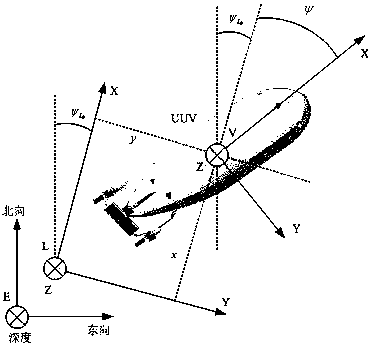
[0069] as attached figure 2 Shown by AUV initial position and initial heading angle Establish the global coordinate system L; V is the AUV hull coordinate system; E is the northeast coordinate system, and the North direction is the geomagnetic north direction. x, y are the position of AUV in L; ψ is the heading angle of AUV in L, obviously where z ψ is the AUV heading angle measured by the motion sensor OCTANS.
[0070] The present invention se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More