

Method for calibrating motion control command of robot and related equipment
A motion control and robot technology, applied in the field of numerical control, can solve the problems of easy error in tool measurement and reduced efficiency of tools
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
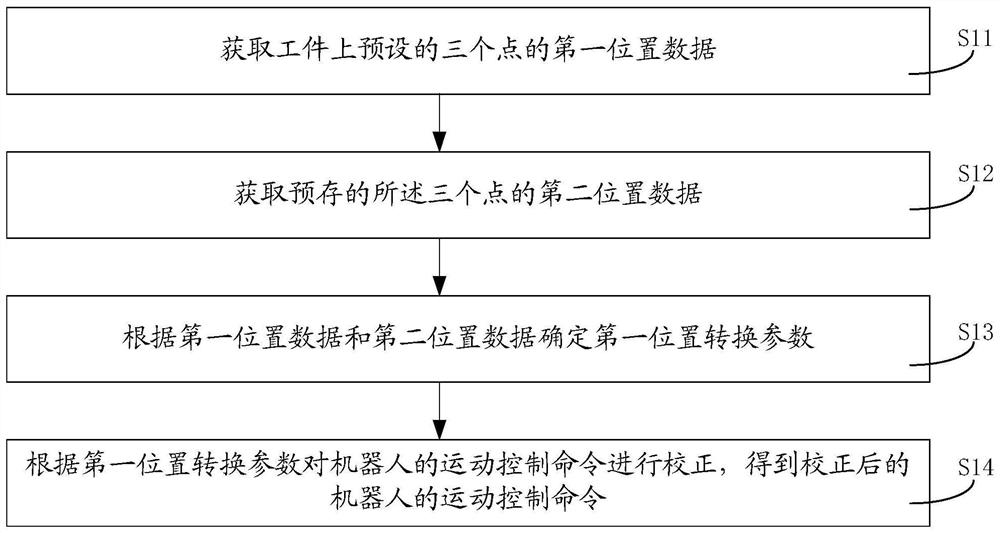
[0020] see figure 1 , figure 1 It is a flow chart of the method for correcting the motion control command of the robot according to the first embodiment of the present invention. In this embodiment, the method for correcting the motion control command of the robot may include the following steps:
[0021] Step S11: Obtain first position data of three preset points on the workpiece.
[0022] In this embodiment, the preset three points may be any three points that are preset on the workpiece and are not collinear. The first position data may be the position data of the three points after the position of the workpiece is changed. Obtaining the first position data of the three preset points on the workpiece can be obtained by obtaining the teaching data input by the user to control the robot to make the tool touch the three points after the workpiece ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More