Facilitating robot positioning
A technology of robots and cameras, which is applied in the field of machines and can solve problems such as precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
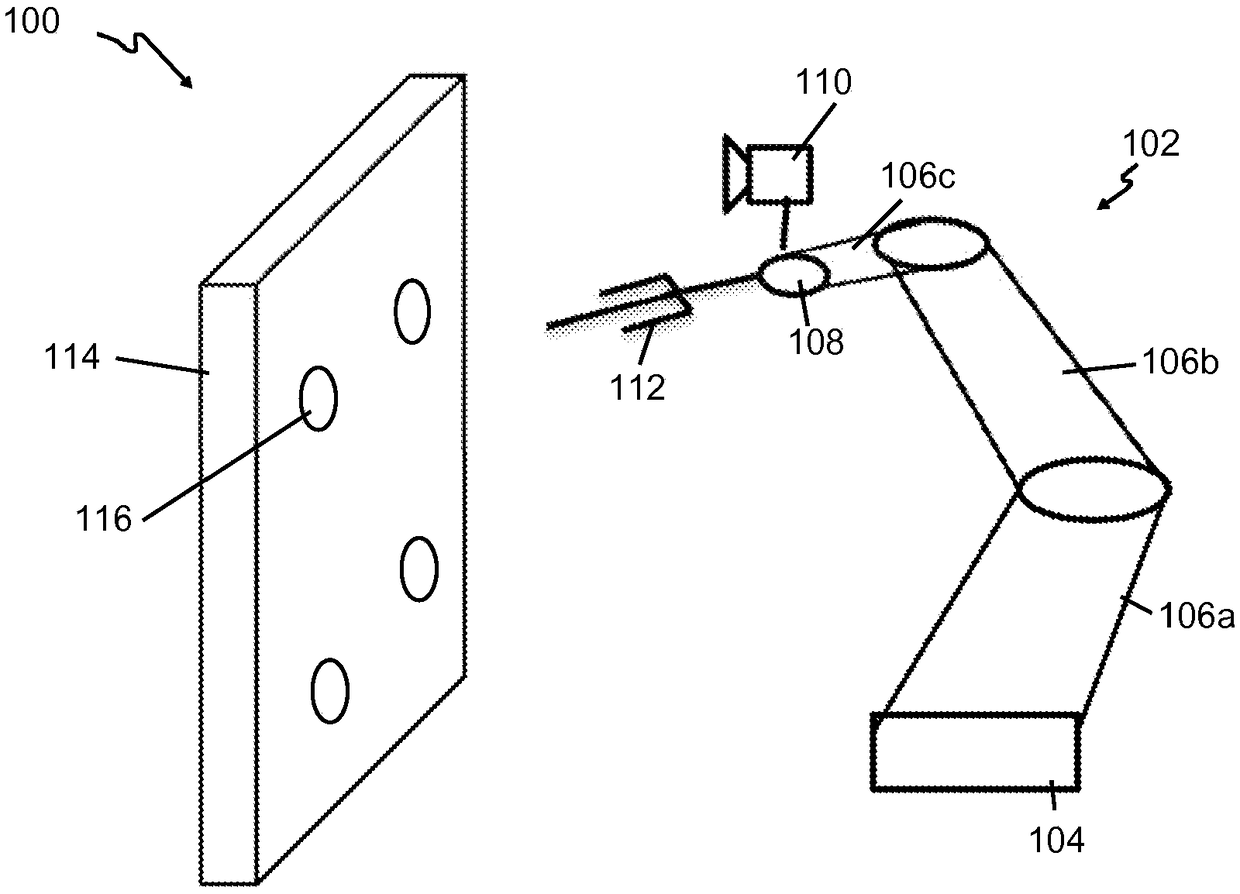
[0013] Aspects described herein relate generally to robotic 3D scanning and robotic positioning, for example, for use with an industrial robotic system that uses a robot-mounted 3D camera to scan a scene in an environment, and then positions the robot to / on the scanned features in the scene to perform the intended action. More specifically, methods for aiding in precise robot positioning are disclosed. As an example, a sensor fusion method is presented that combines robot position measurements (“robot odometry”) with an image registration method (“visual odometry”) that can be used to automatically perform camera-to-robot calibration And improve the accuracy of robot positioning. This is particularly useful for robotic applications in areas where the position or characteristic properties of objects are unknown.
[0014] One such application is by way of example and not limitation in figure 1 is depicted in , which details an example environment in which a robot works on a w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com