

Linkage-type prosthetic hand
A prosthetic hand and linkage technology, applied in the field of bionic hands, can solve the problems of poor anti-reversal ability, low clamping force, complex structure, etc., and achieve the effect of strong support, anti-reversal, and avoid cumbersome structures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
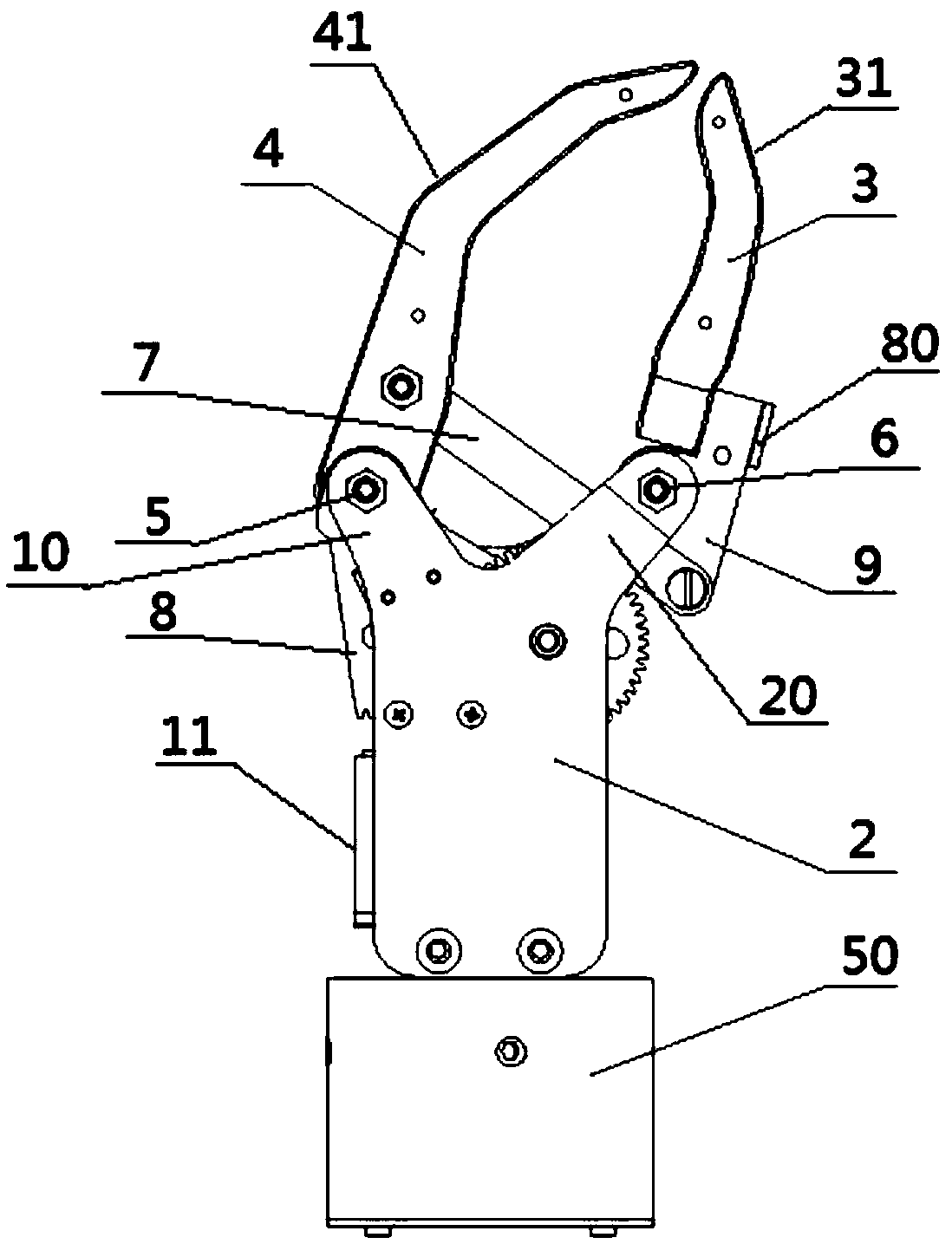
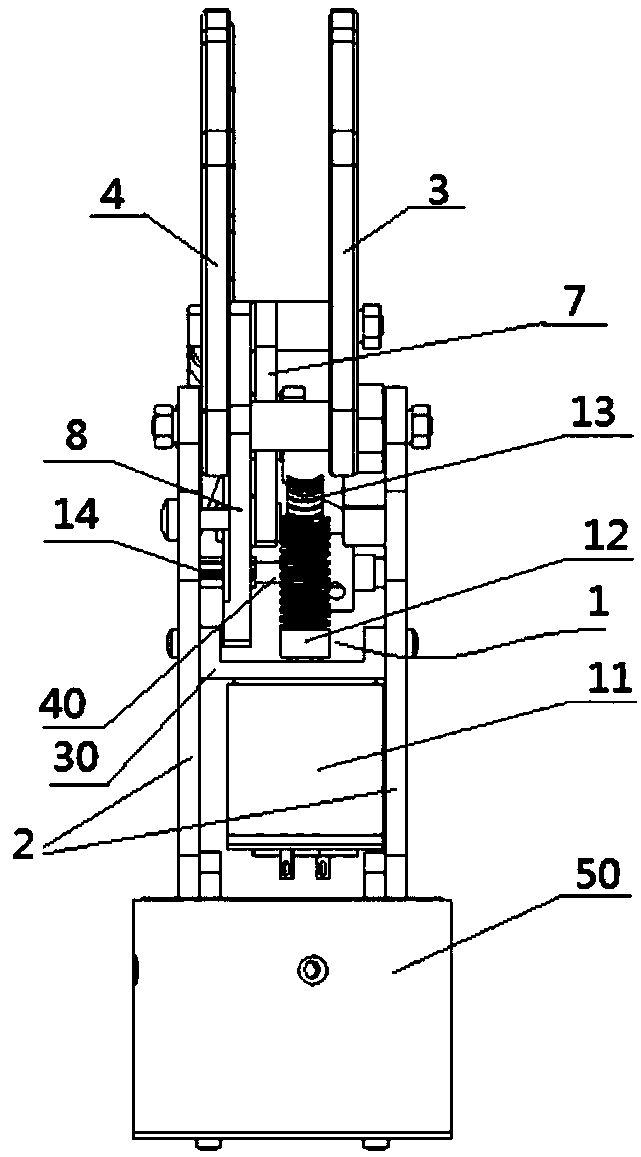
[0038] Such as figure 1 and figure 2 As shown, the present invention provides a linkage prosthetic hand, comprising a rotating wrist 50, a gear drive device 1, two support plates 2, a thumb 3 positioned above the two support plates 2 and a finger 4 kneaded with the thumb 3, and two support plates 2 is vertically arranged on the rotating wrist 50, the fingers 4 form a relative rotation connection with the two support plates 2 through the first rotating shaft 5 arranged between the two support plates 2, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More