

A multi-hive robot driven by four-wheeled paddles with dry-adhesive claws and its locomotion method
A technology of dry adhesion and robotics, applied in the field of robotics, can solve problems such as bionic movement methods that have not been reported, have not been researched, and robot functions are limited, and achieve superior multi-dwelling movement capabilities, strong environmental adaptability, and clear movement principles Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
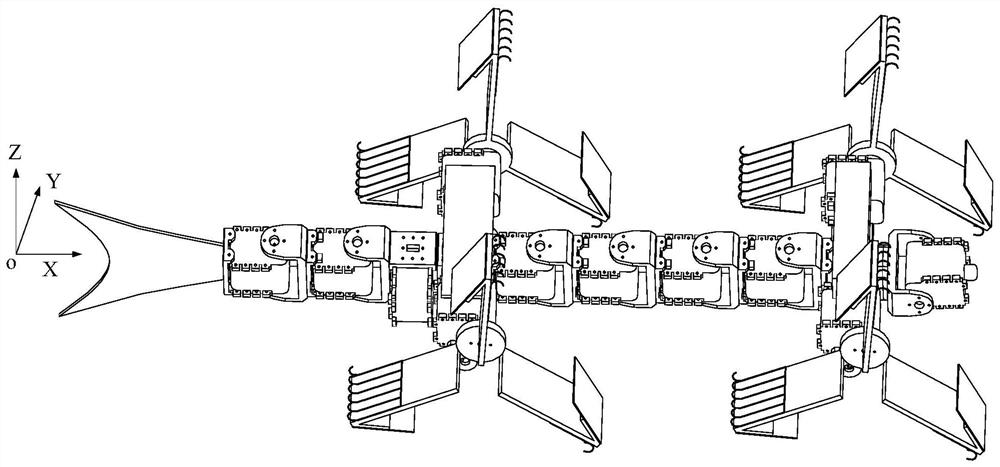
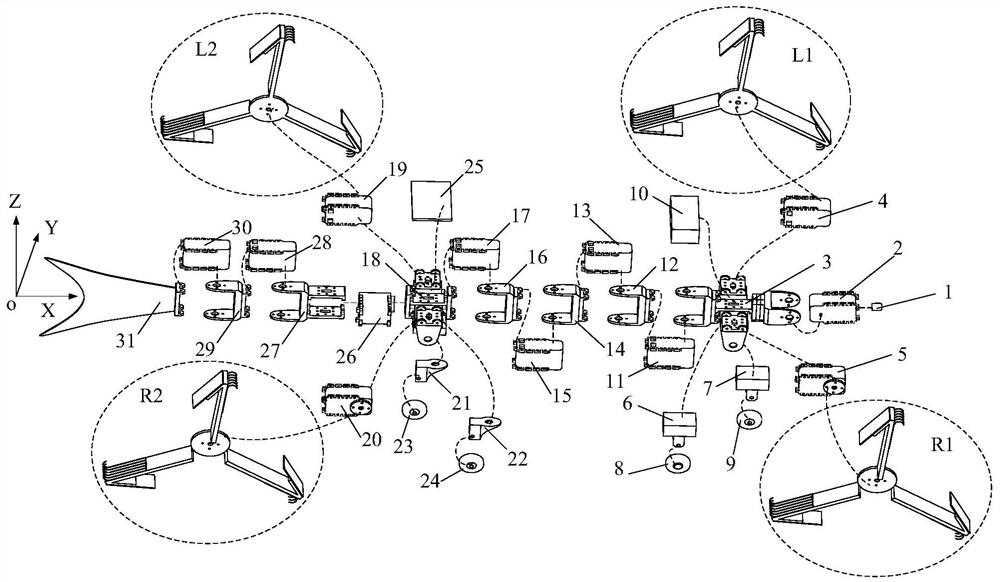
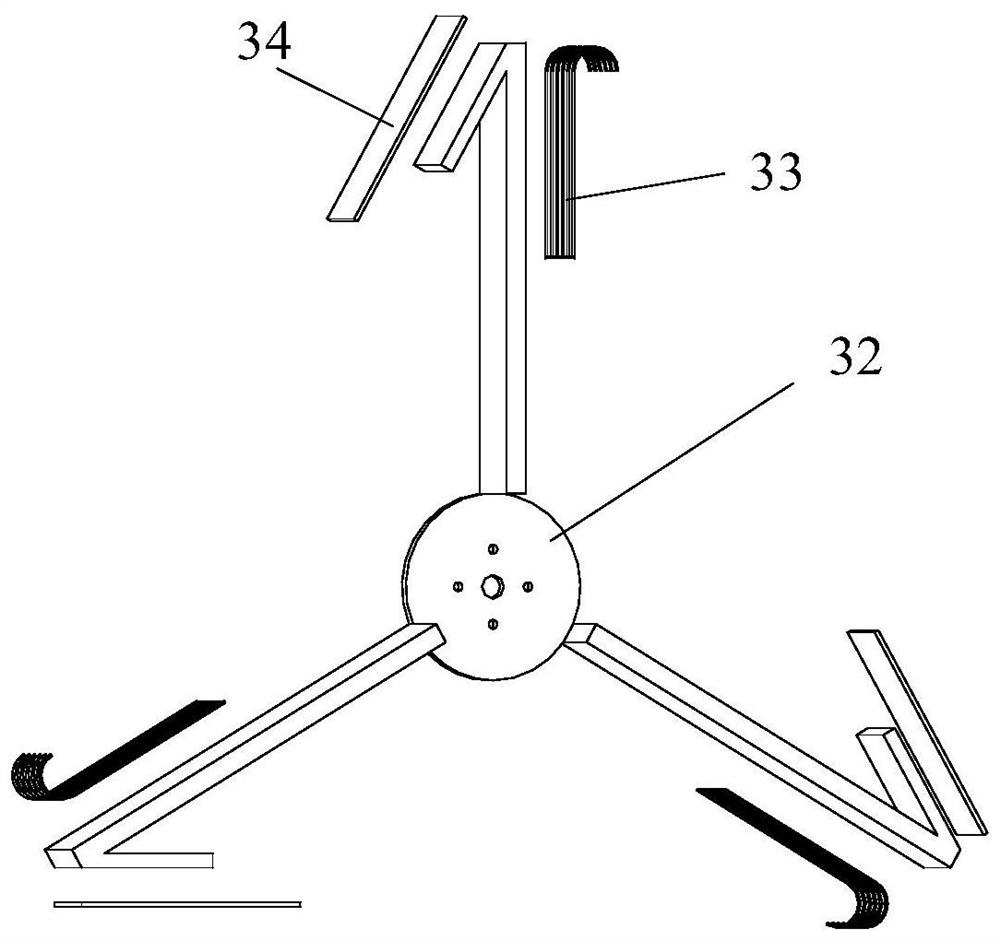
[0037] to combine Figure 1-13 , this embodiment is a multi-dwelling robot driven by four-wheeled paddles with dry adhesion claws and its bionic movement, including a camera 1, a head Y-axis steering gear 2, a front foot support frame 3, and a left front wheel Y-axis Steering gear 4, right front wheel Y-axis steering gear 5, left front wheel support block 6, right front wheel support block 7, left front support wheel 8, right front support wheel 9, battery 10, body Z-axis first steering gear 11 , the U-shaped connector 12 of the first steering gear in the Z-axis of the body, the second steering gear 13 in the Z-axis of the body, the U-shaped connector 14 of the second steering gear in the Z-axis of the body, the third steering gear 15 of the Z-axis of the body, Z-axis third steering gear U-shaped connector 16, body Z-axis fourth steering gear 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More