

A Simplified Robust Adaptive Pitch Control Method for Multihull Vessels
A control method, simplified and robust technology, applied in the field of simplified robust adaptive anti-pitch control of multihull ships, which can solve the problems of no research, complex design, conservative controller design, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
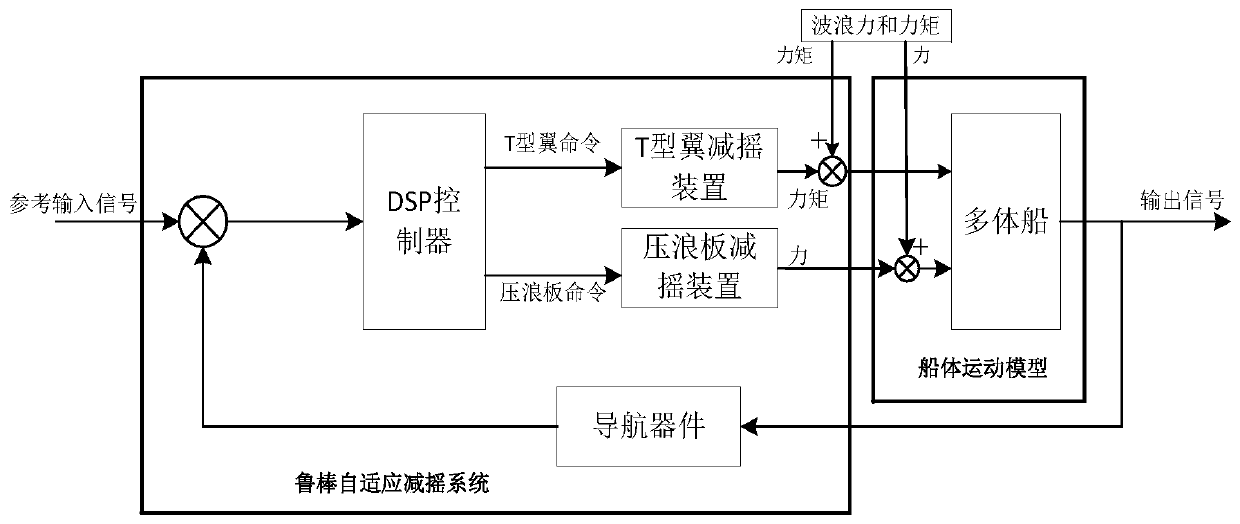
[0070] This method uses a simplified feedforward and feedback compound control method to robustly reduce the pitch of multihull ships. The control principle is as follows: figure 1 As shown in , the anti-rolling control system is designed for multihull ships. The control system includes DSP controller, navigation device, executive structure T-wing and wave suppressor. The navigation devices include gyroscopes and vertical accelerometers installed near the hull center of the multihull, which are used to measure the attitude and position of the multihull. The pitch angle is measured by the gyroscope...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More