

A lightweight and fast target detection method for hand-eye manipulator system is presented
A target detection and robotic arm technology, applied in the field of computer vision, can solve problems such as large network models, unreliable real-time requirements, and unguaranteed real-time performance, and achieve the effect of reducing storage and computing costs and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] see figure 1 Shown, the technical scheme that this embodiment mode adopts is: it comprises the following steps:
[0016] Step 1: Collection of training set: Collect pictures of targets in various situations in actual application scenarios, and fully collect pictures of targets under various lighting conditions and background conditions;
[0017] Step 2: Design and train a deep convolutional network model;
[0018] Step 3: Apply the trained model to target detection in the actual environment, and output the category and position of the target in the picture.
[0019] The method used in the training of step 2 is the SGD stochastic gradient descent method.
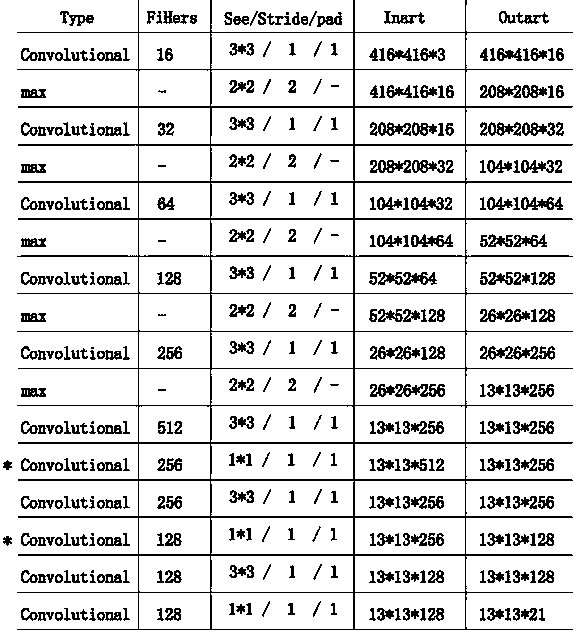
[0020] The network structure of the model is as figure 1 As shown, the layer marked with * is the convolution layer with the size of 1x1 convolution kernel that we use, and its main purpose is to compress and reduce the dimensionality of features. The last convolutional layer is the output layer of the network, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More