A path planning method for intelligent unmanned ships based on ia* algorithm
A path planning and ship technology, applied in navigation calculation tools, navigation, instruments, etc., can solve the problems of unable to ensure the safe, stable and efficient navigation of intelligent unmanned ships, ship rollover, capsizing, and short path distances, and achieve safe, stable and efficient navigation. The effect of sailing, increasing maneuverability, avoiding high-angle steering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments.
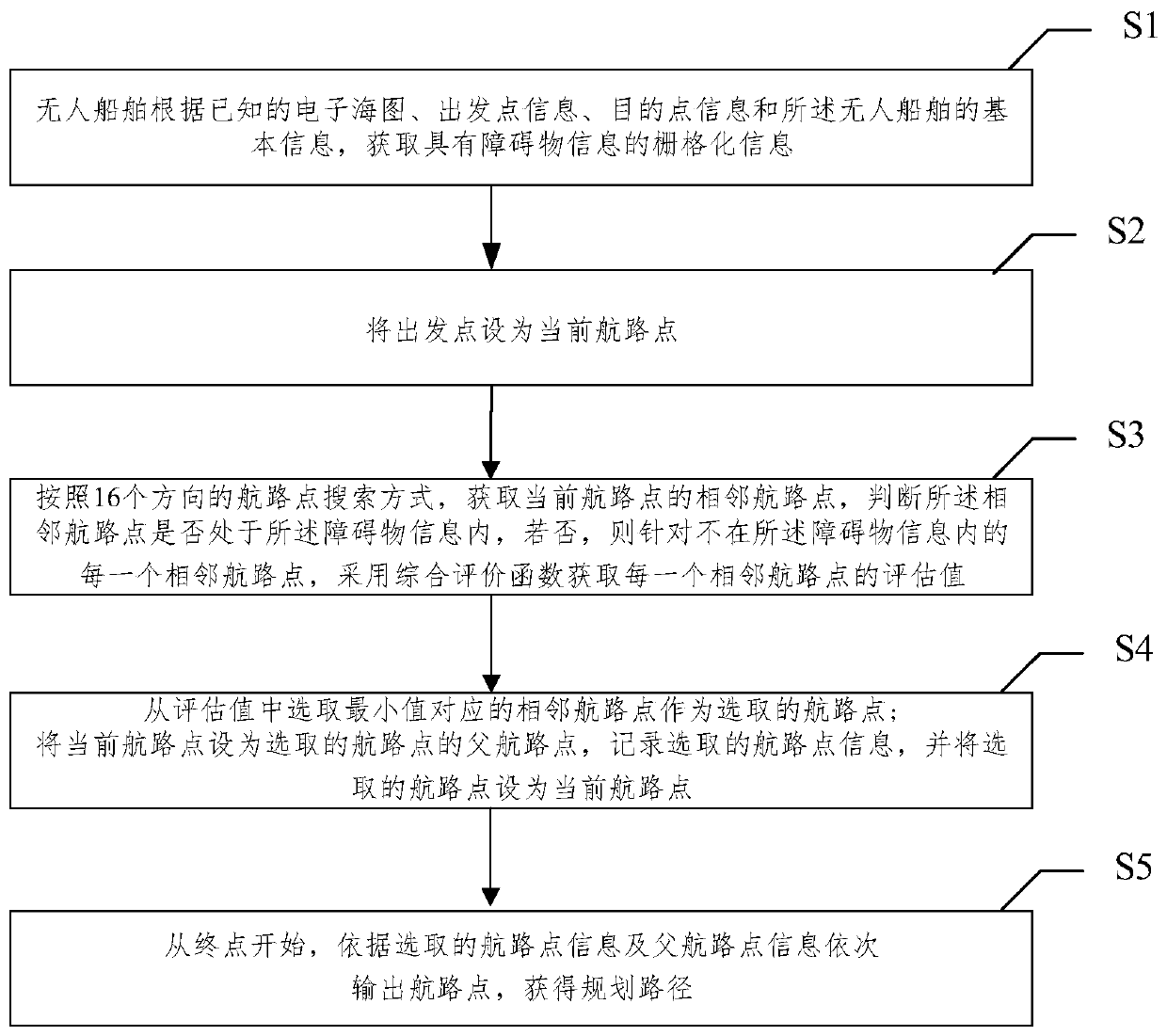
[0044] Such as figure 1 Shown, a kind of intelligent unmanned ship path planning method based on IA* algorithm of the present invention comprises the following steps:
[0045] S1. The unmanned ship acquires gridded information with obstacle information according to the known electronic chart, starting point information, destination point information and basic information of the unmanned ship.
[0046] S2. Set the starting point as the current waypoint;
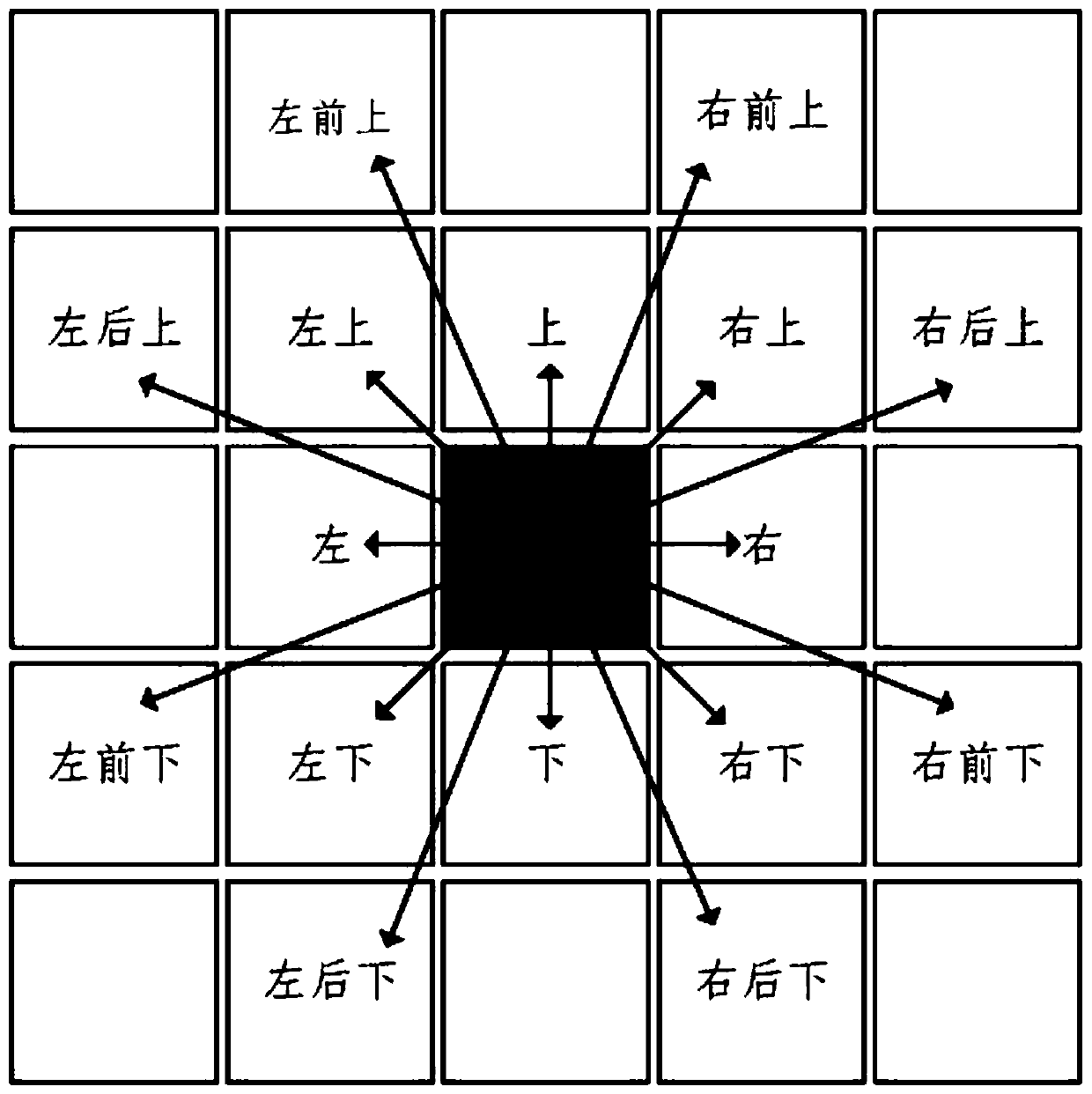
[0047] S3. Obtain the adjacent waypoints of the current waypoint according to the waypoint search method in 16 directions, and judge whether the adjacent waypoints are within the obstacle information, and if not, target the waypoints not within the obstacle information For each adjacent waypoint of , use the comprehensive evaluation function to obtain th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com