A robot collision detection method and device based on speed deviation
A speed deviation and collision detection technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex calculation, low real-time performance, adding additional sensors, etc., to simplify the robot collision detection system and improve the detection sensitivity. , the effect of reducing the speed deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0059] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in combination with specific embodiments and with reference to the accompanying drawings. It should be understood that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concept of the present invention.
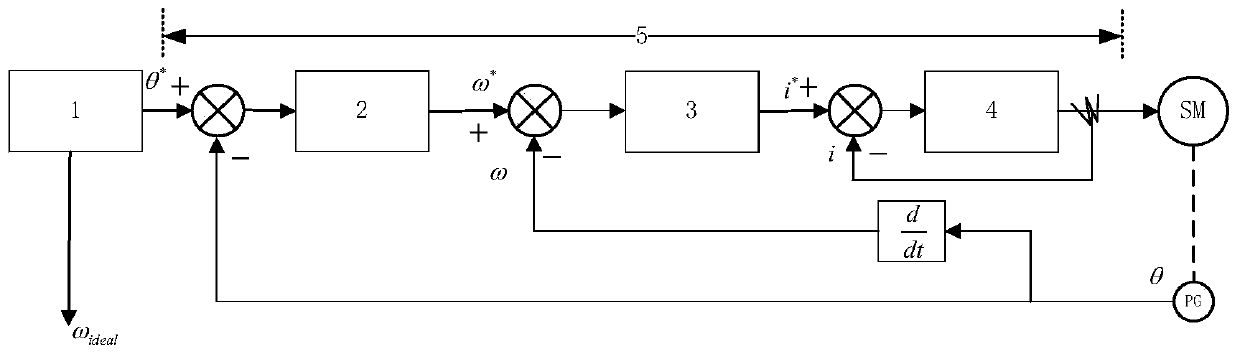
[0060] The purpose of the present invention is to provide a simple and effective robot collision detection solution without adding additional sensors, aiming at the disadvantages of adding additional sensors or complex calculations or low real-time performance in existing robot collision detection solutions. Generally speaking, a robot has multiple degrees of freedom, and the control system of each degree of freedom is as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More