

Unmanned aerial vehicle tracking motion system and method based on binocular vision distance measurement
A moving target and binocular vision technology, applied in the field of UAV tracking, can solve the problem of being unable to track non-cooperative moving targets in the air, and achieve high real-time performance and easy implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
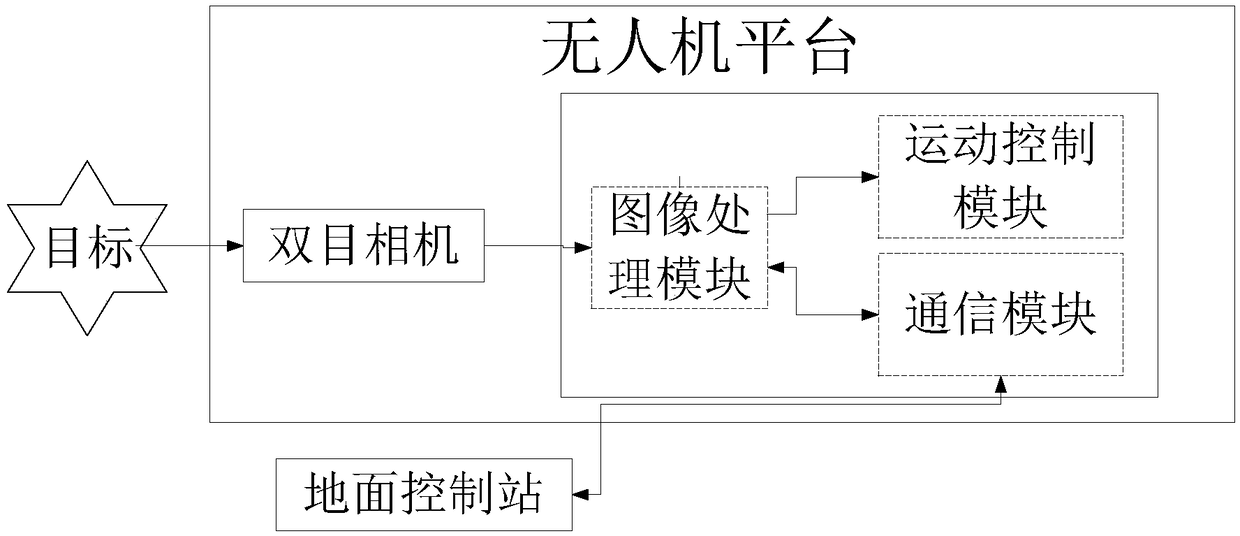
[0048] A specific embodiment of the present invention discloses a UAV tracking moving target system based on binocular vision ranging, such as figure 1 As shown, including: UAV platform, ground control station;
[0049] The unmanned aerial vehicle platform acquires images of moving targets in real time through binocular cameras, performs reference image tracking and binocular stereo matching, obtains the spatial three-dimensional coordinates of moving targets, and automatically approaches and tracks moving targets;
[0050] The ground control station is used to guide the UAV platform to initially approach the moving target, receive and display the moving target image sent by the UAV platform, and perform preliminary calibration on the target area in the image.
[0051]During implementation, after using the ground control station and other auxiliary equipment to guide the UAV platform to initially approach the moving target, after the moving target enters the field of view of t...
Embodiment 2
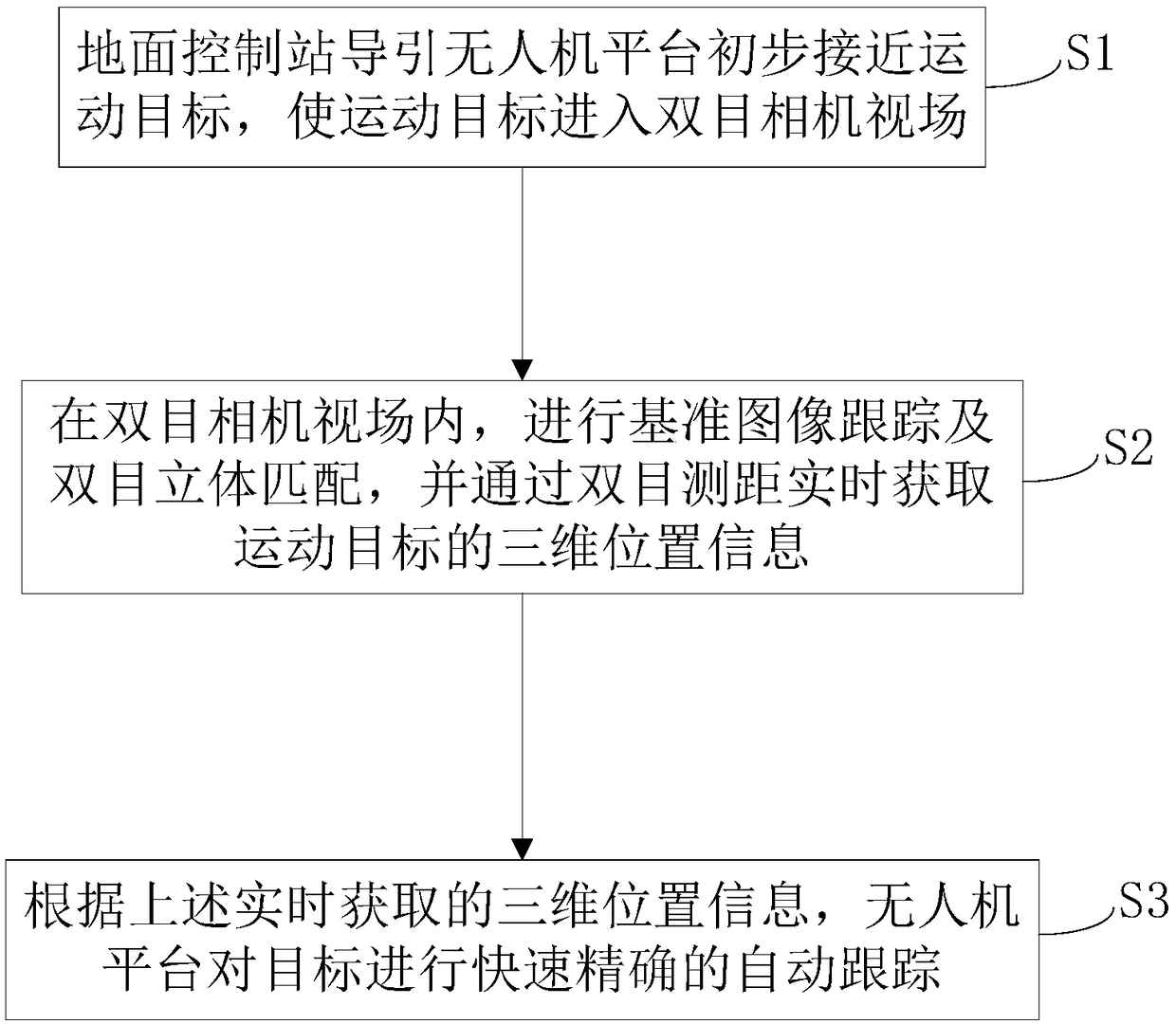
[0062] This embodiment discloses a method for tracking a moving target based on binocular vision distance measurement using the system in Embodiment 1, such as figure 2 shown, including the following steps:
[0063] Step S1, the ground control station guides the UAV to initially approach the target, so that the target enters the field of view of the binocular camera;
[0064] Step S2, in the field of view of the binocular camera, perform reference image tracking and binocular stereo matching, and obtain the three-dimensional position information of the moving target in real time through binocular ranging;
[0065] Step S3, according to the 3D position information obtained in real time, the UAV platform performs fast and accurate automatic tracking of the target.
[0066] Compared with the prior art, the binocular vision distance measurement-based UAV tracking moving target method provided by this embodiment uses a binocular camera for three-dimensional positioning of the tar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More