

Manipulator artificial potential field space path planning method combined with spherical tree model
A technology of artificial potential field and space path, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve the problem that the repulsion of the target point is not zero.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
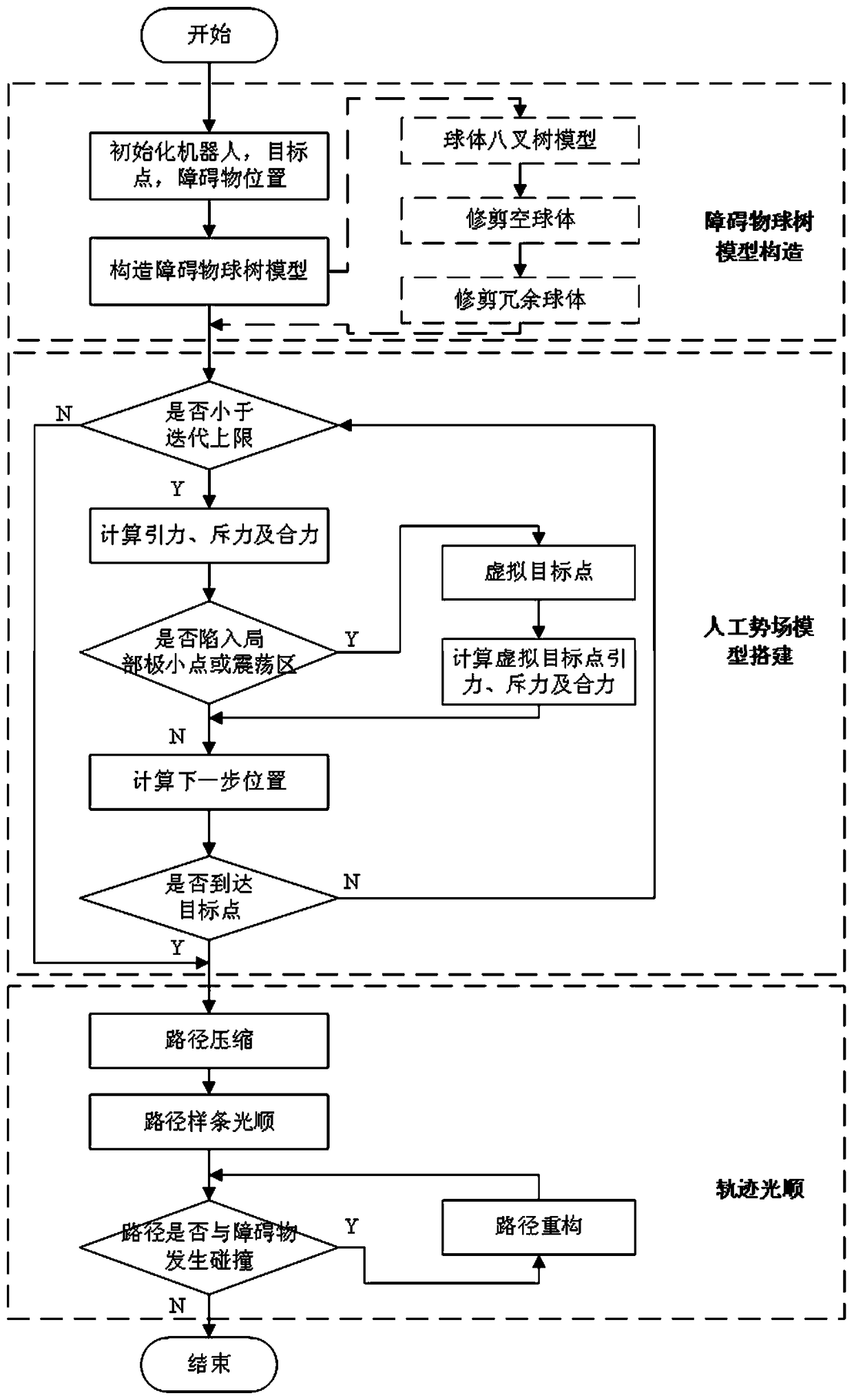
Method used
Image

Examples
Embodiment
[0125] The initial position of the robot is (100,500,350); the target position is (400,150,350), the obstacle 1 coordinates (200,450,350), the influence diameter is 65; the obstacle 2 coordinates (350,450,350), the influence diameter is 65; the obstacle 3 coordinates (225,250,350), the influence diameter is 75 ; Obstacle 4 coordinates (350, 250, 350), affecting diameter 75.
[0126] Simulation effect:
[0127] Such as Figures 8a-8c As shown, it can be seen from the obstacle avoidance simulation effect diagram that the method of the present invention can realize effective obstacle avoidance and selection of a better path for the robot in complex obstacles and unknown environments. When the point is reached, it can realize the smooth processing of the trajectory and realize the optimization of the trajectory.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More