

Laser radar and visual sensor fused dynamic grid map structuring method
A visual sensor and laser radar technology, applied in the direction of re-radiation, instrumentation, electromagnetic wave re-radiation, etc., can solve the problems of lack of recognition and estimation of behavioral characteristics, and achieve the effect of enriching information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific implementation of the present invention will be described in detail below in conjunction with preferred embodiments.
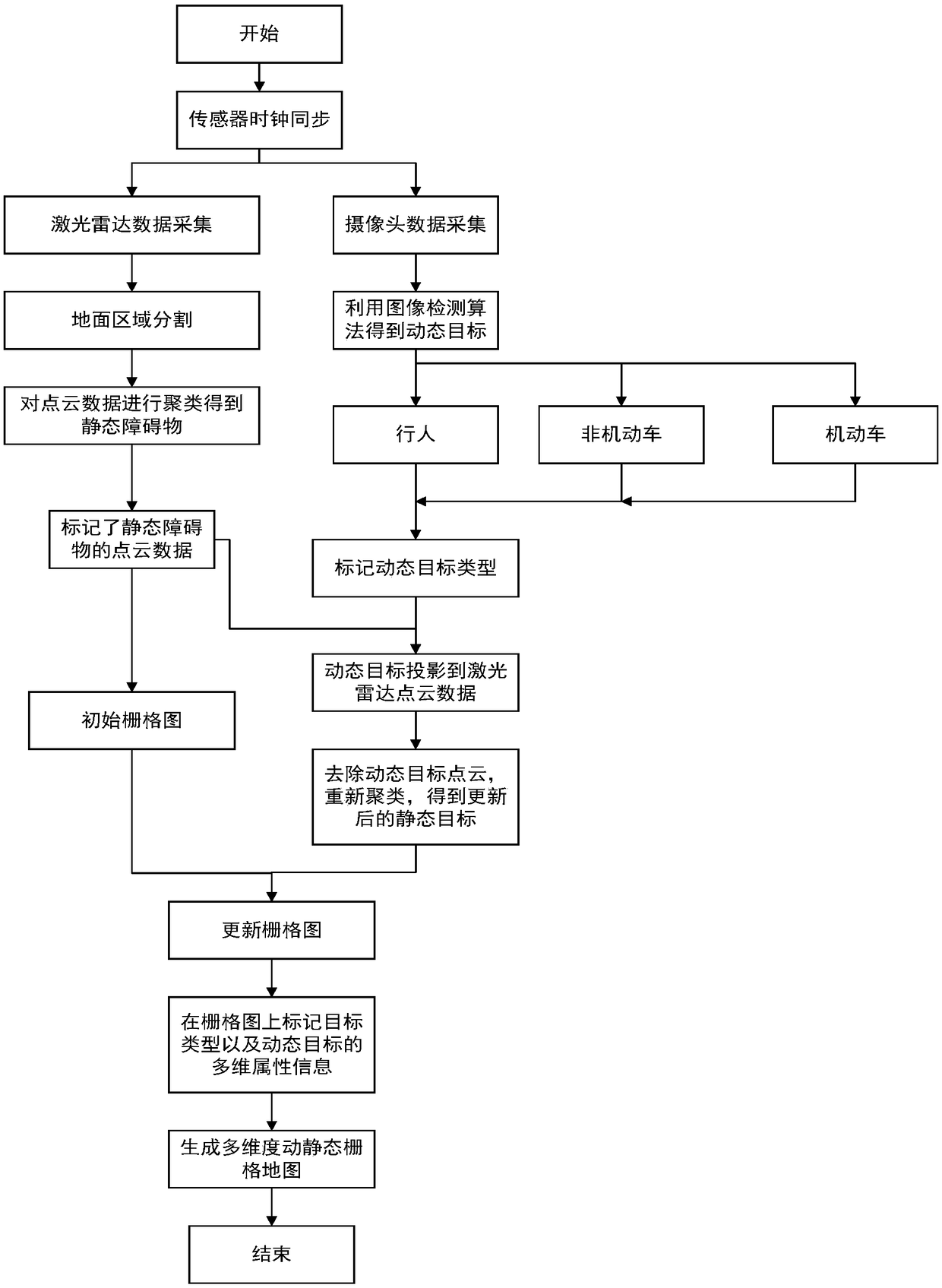
[0026] see attached figure 1 , 2 , this embodiment provides a method for constructing a dynamic and static grid map by fusion of lidar and visual sensors, which jointly calibrates the lidar and visual sensors of driving vehicles, identifies static targets and dynamic targets by classification, and ensures time synchronization of sensor information ; During the driving process of the vehicle, the following steps are performed in each cycle to construct a multi-dimensional dynamic and static grid map. The specific steps are as follows:
[0027] Step 1. Use Velodyne 16-line lidar to collect lidar point cloud data. Ground region segmentation using point cloud data elevation information. Clustering the point cloud data to obtain static targets, the static targets, that is, static obstacles, do not need to distinguish their types, only their p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More