A multi-robot multi-region collaborative search task assignment method
A task distribution and multi-robot technology, applied in the direction of instruments, data processing applications, computing, etc., can solve the problems of low distribution efficiency, falling into local optimum, and difficulty in ensuring real-time performance, so as to save computing costs and time costs, and ensure The effect of completing the efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0030] The present invention provides a two-stage heuristic task allocation method for typical multi-robot multi-region collaborative search tasks, which can make full use of the heuristic knowledge contained in the problem to construct a solution to obtain multi-robot multi-region collaborative search tasks Robot distribution scheme.
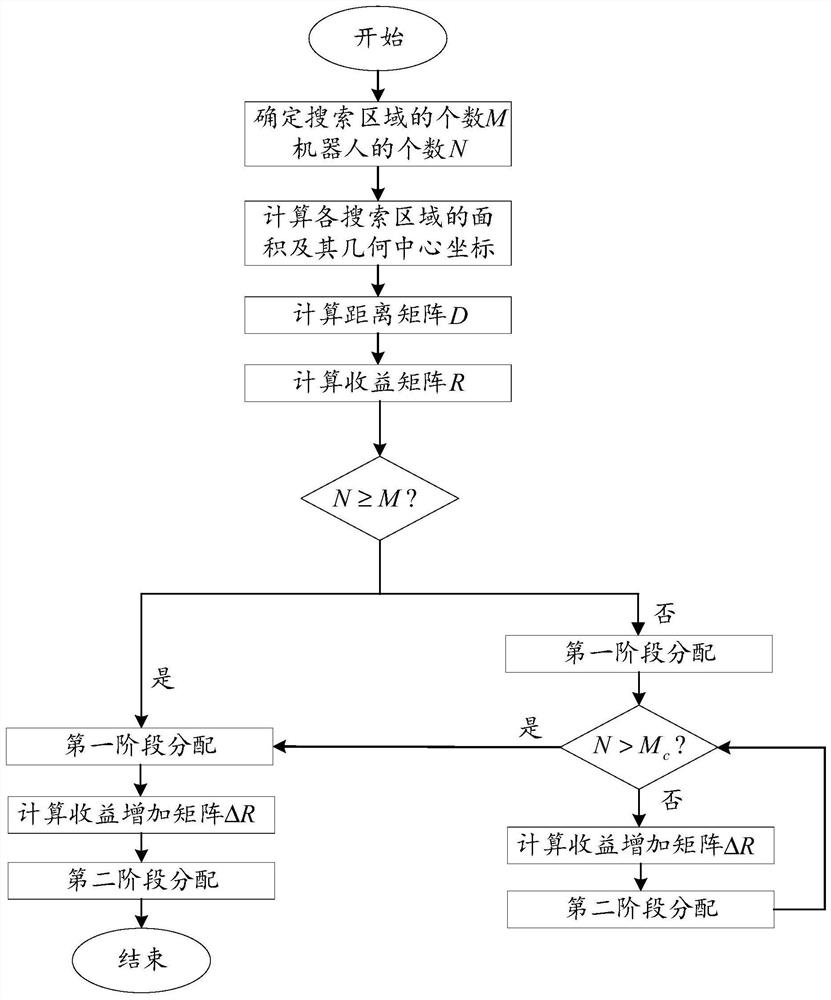
[0031] A multi-robot multi-region collaborative search task assignment method of the present invention, such as figure 1 shown, including the following steps:
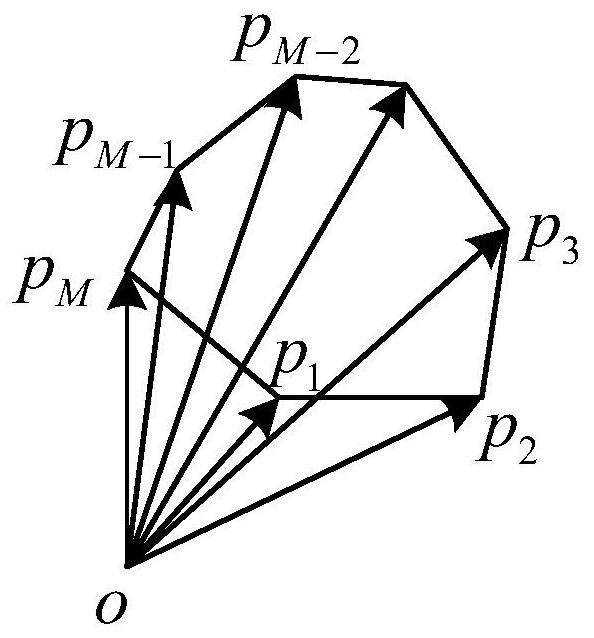
[0032] Step 1. Determine the number N of robots and the number M of search areas; calculate the area S of each search area j (j=1,2,...,M) and the coordinate O of its geometric center point j (x j ,y j ): Since the search area is represented in the form of a polygon, an arbitrary polygon area calculation formula can be used when calculating the area of a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



