

Optimization method of maneuvering target state prediction based on Kalman filter
A Kalman filter and maneuvering target technology, applied in the field of target prediction optimization and maneuvering target state prediction, which can solve the problems of divergence, inability to obtain, and loss of tracking data for target prediction results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] A linear stochastic system is a system that satisfies both the characteristics of a linear system and a stochastic control system. A stochastic control system is a dynamic system affected by random factors. A linear system is one that satisfies both superposition and uniformity. Kalman filtering is an algorithm that uses the linear system state equation to optimally estimate the system state through the input and output observation data of the system.
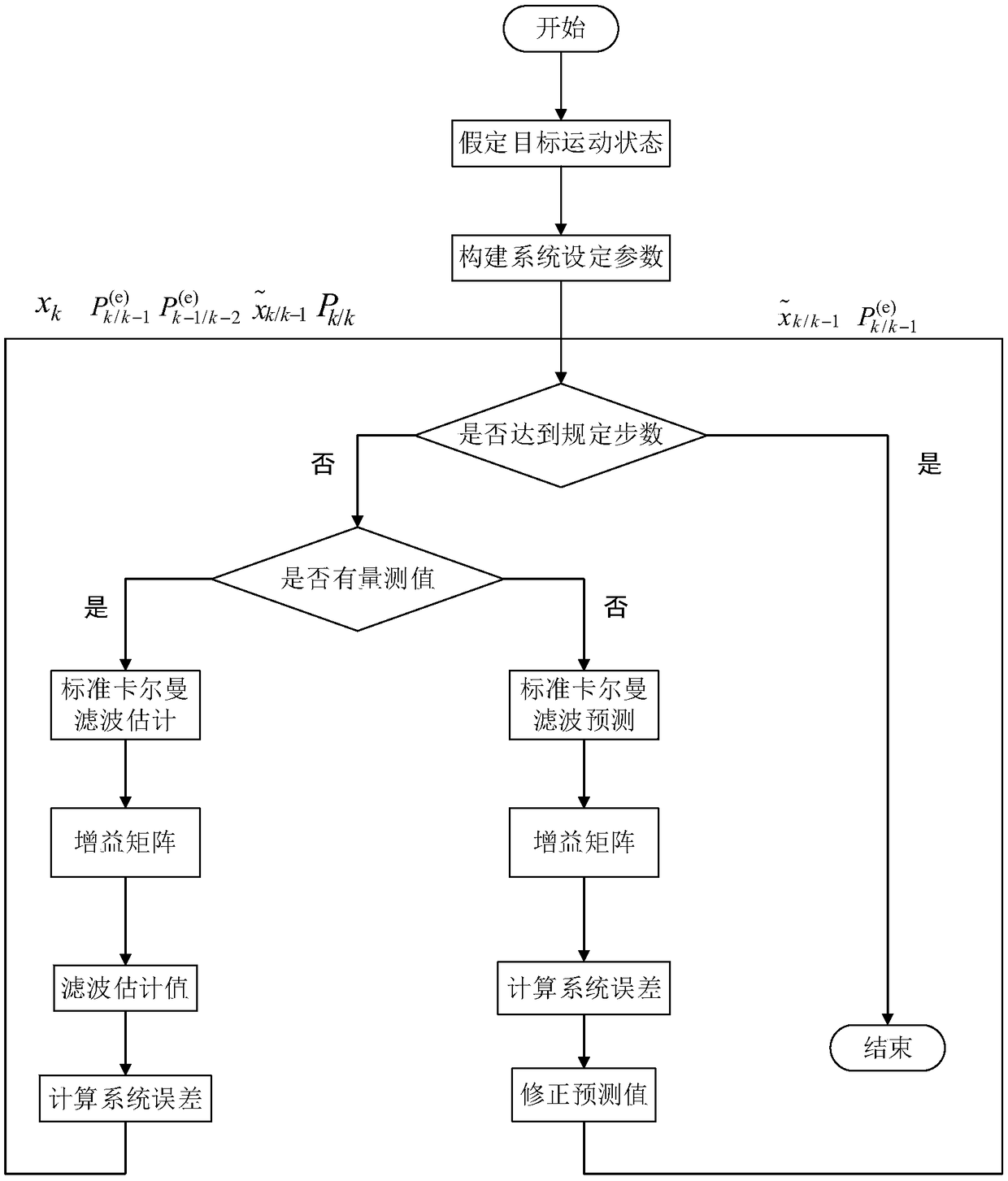
[0041] refer to figure 1 , the implementation steps of the present invention are as follows:
[0042] Step 1. Set the current motion state of the target as the steering motion state.
[0043] Step 2, setting the linear random system parameters of the target, and calculating its state vector and measurement vector.
[0044] 2.1) Set the following parameters of the linear stochastic system:
[0045] System state transition matrix F at time k k ; Process evolution noise w at time k k ; The noise matrix Γ at time k k ;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More