Medical image robot and control and medical image recognition method thereof
A technology for medical imaging and identification methods, applied in the field of intelligent robots, can solve problems such as poor mobility, unusable, immovable, etc., to ensure timeliness, improve user experience, and improve convenience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
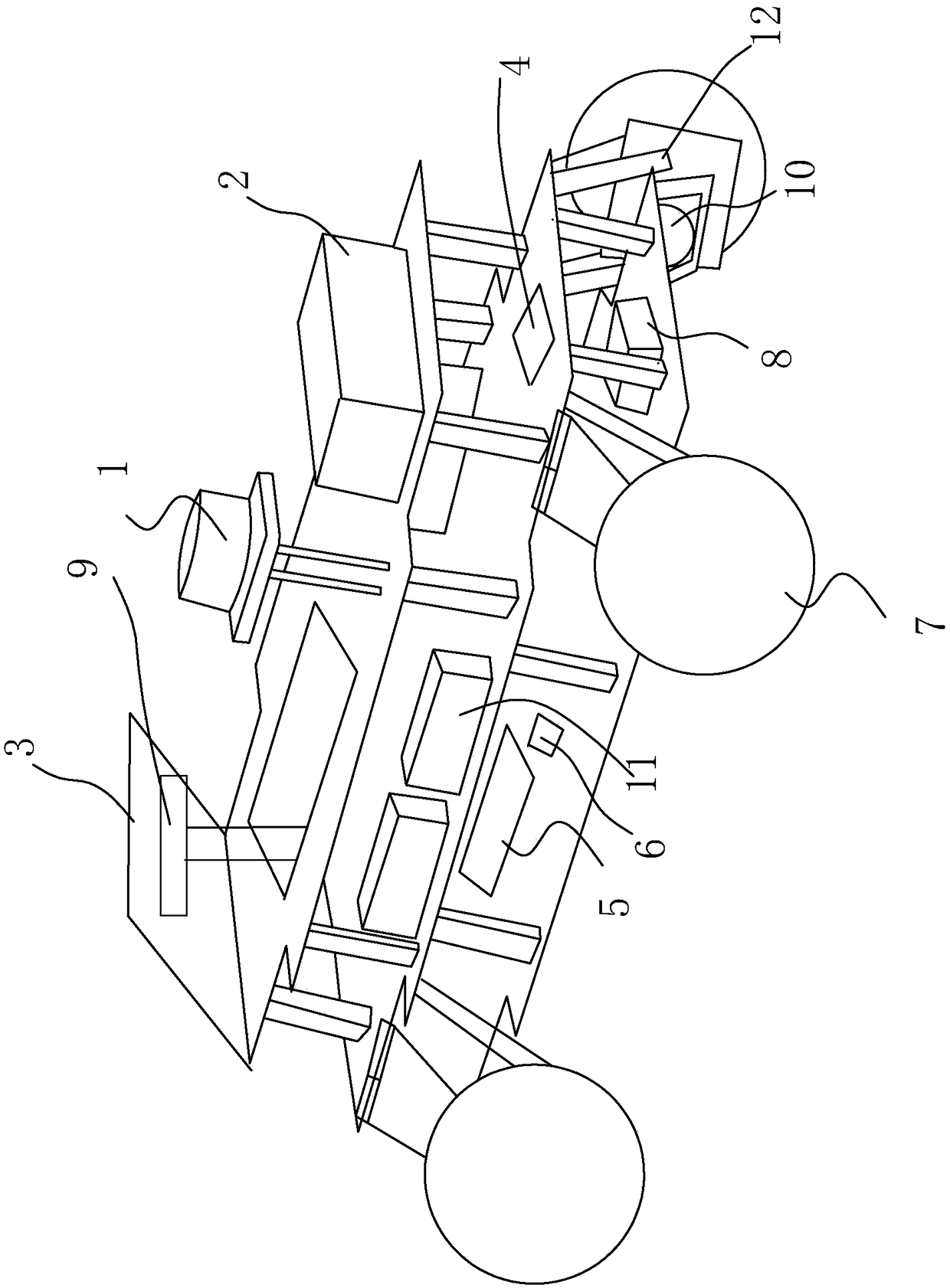
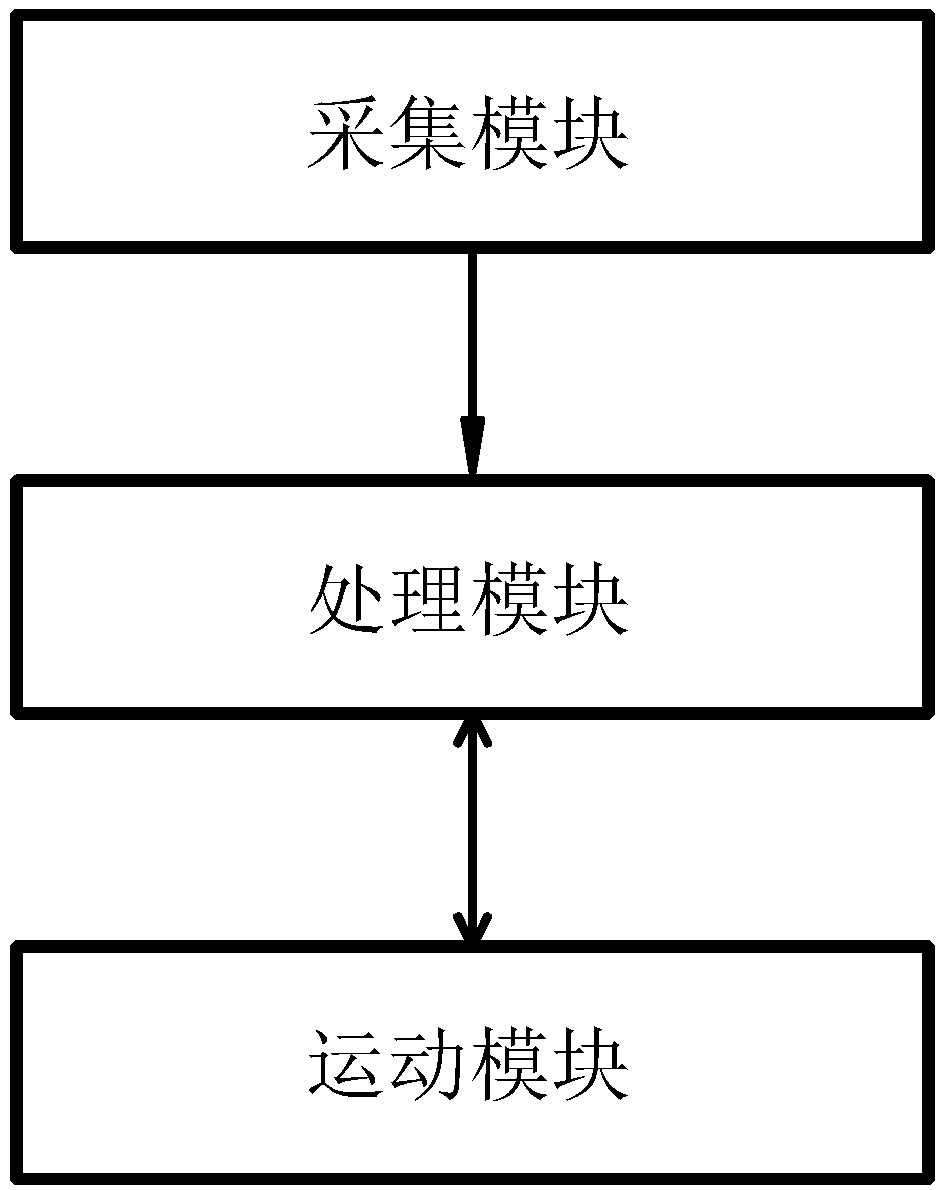
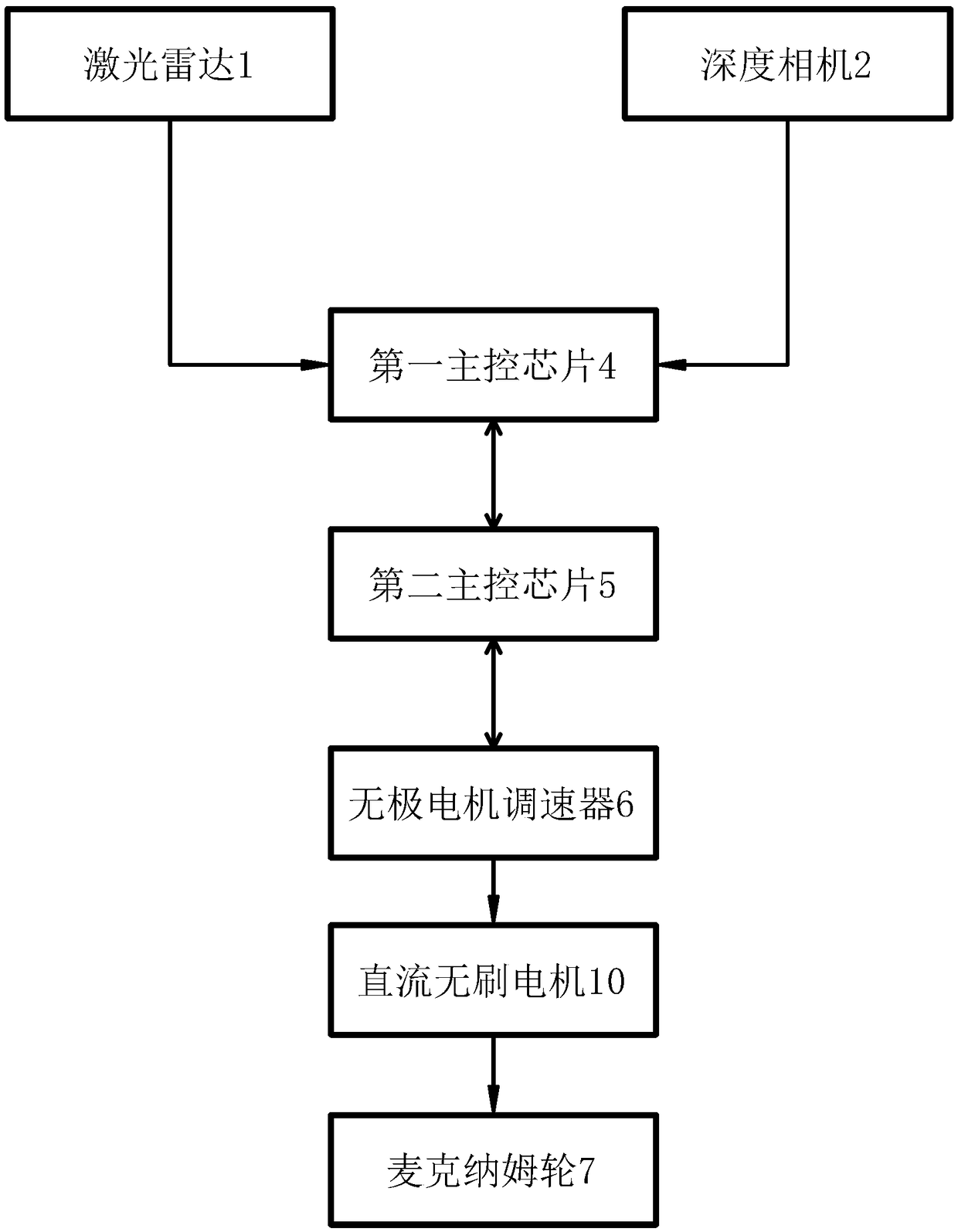
[0042] refer to Figure 1-Figure 3 , a medical imaging robot of the present invention, comprising: an acquisition module and a processing module, wherein the acquisition module includes a laser radar 1 for acquiring scan values for constructing a map and a depth camera 2 for acquiring distance information;
[0043] Described processing module comprises the first main control chip 4 that is used to process the data that acquisition module sends and the second main control chip 5 that is used to transmit motion data, the input terminal of described first main control chip 4 is connected with the acquisition module The output terminals are connected, the second main control chip 5 is connected with the first main control chip 4, and the first main control chip 4 sends motion control information to the second main control chip 5 in response to the acquisition information sent by the acquisition module ;
[0044] Also includes a motion module, the motion module is connected to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More