

Test method of load of tool end of robot
A test method and robot technology, applied in the field of robotics, can solve problems such as large amount of calculation, increased equipment cost, and complicated calculation process, and achieve the effects of improving measurement accuracy, saving costs, and avoiding moment of inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
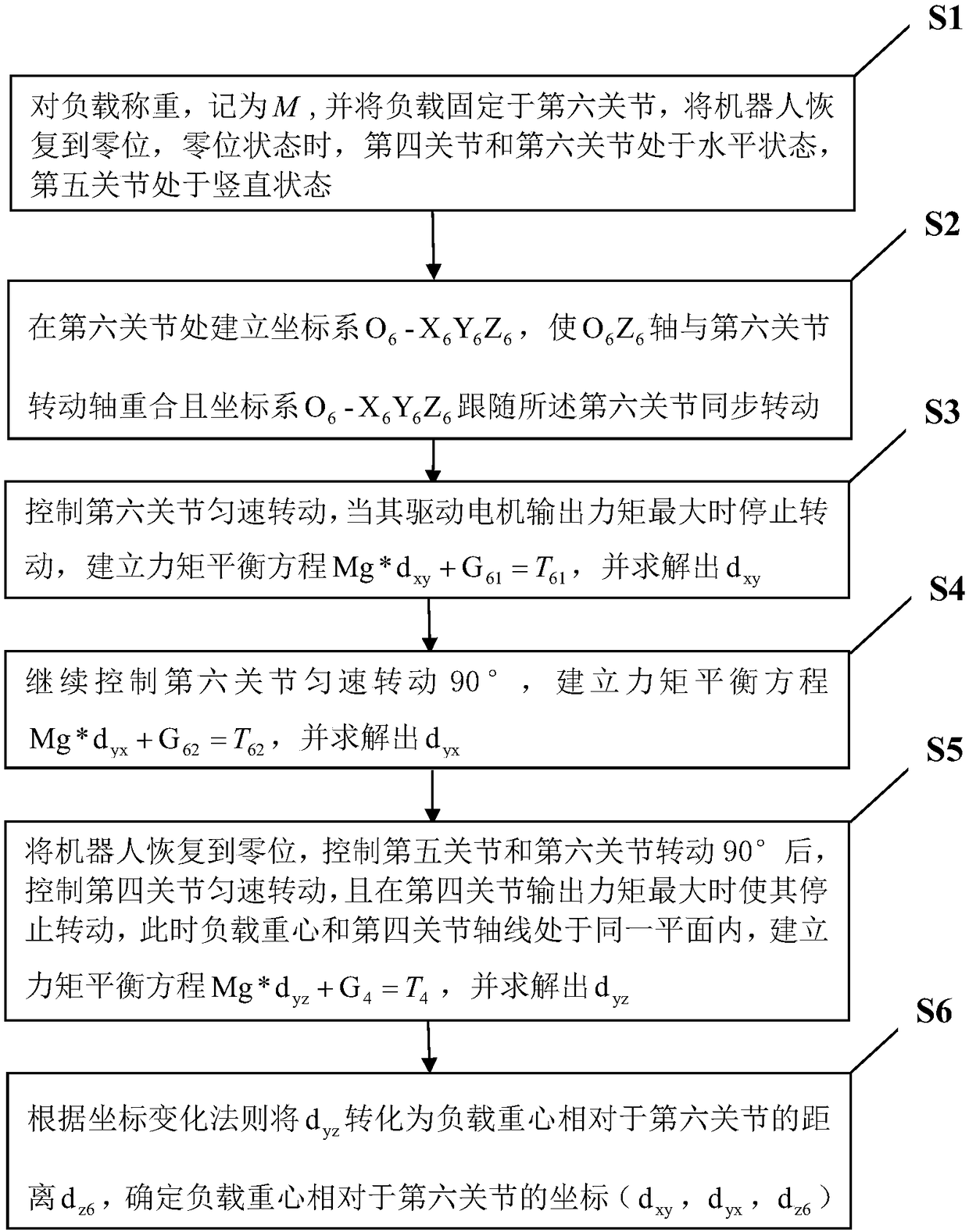
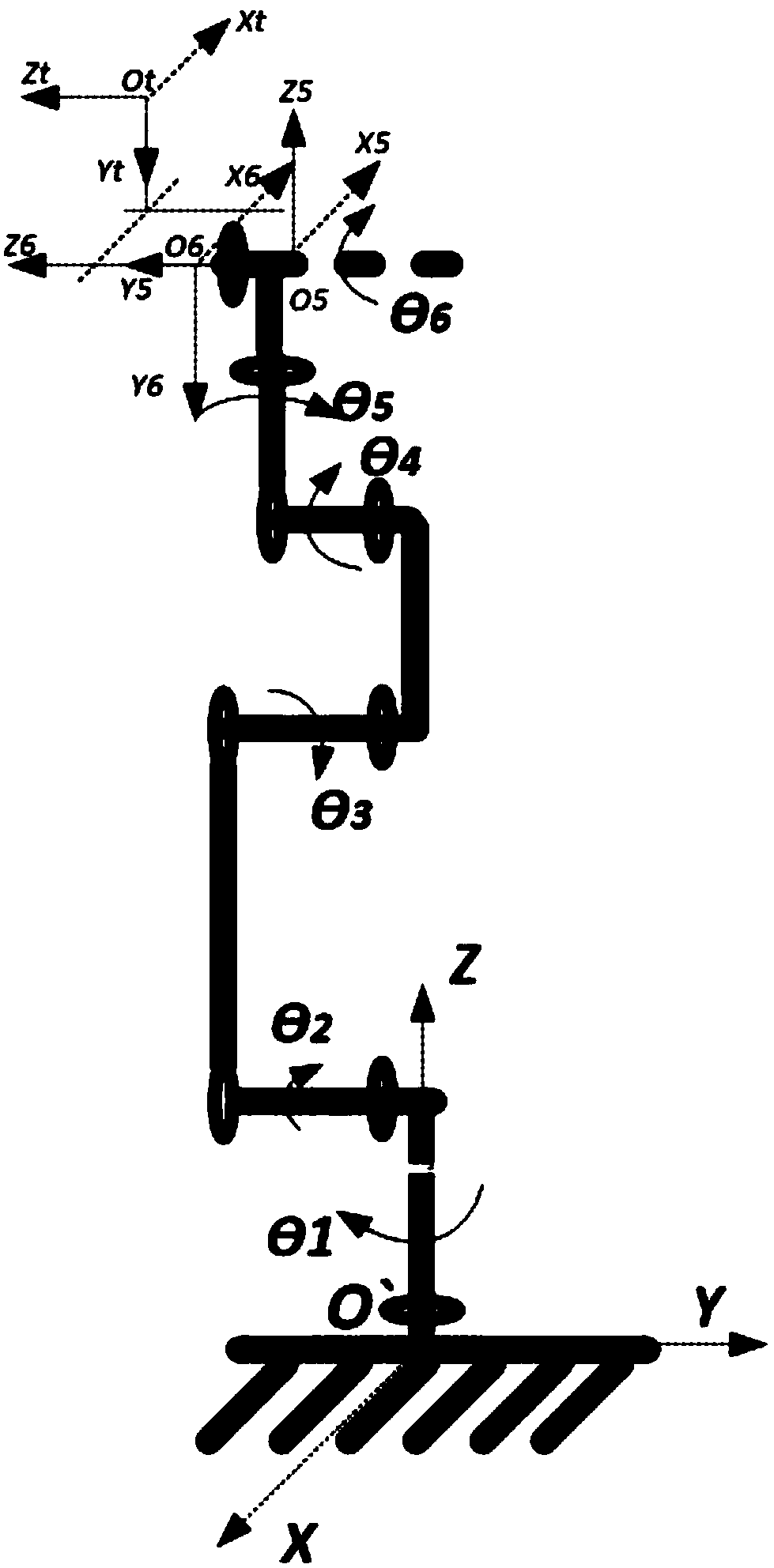
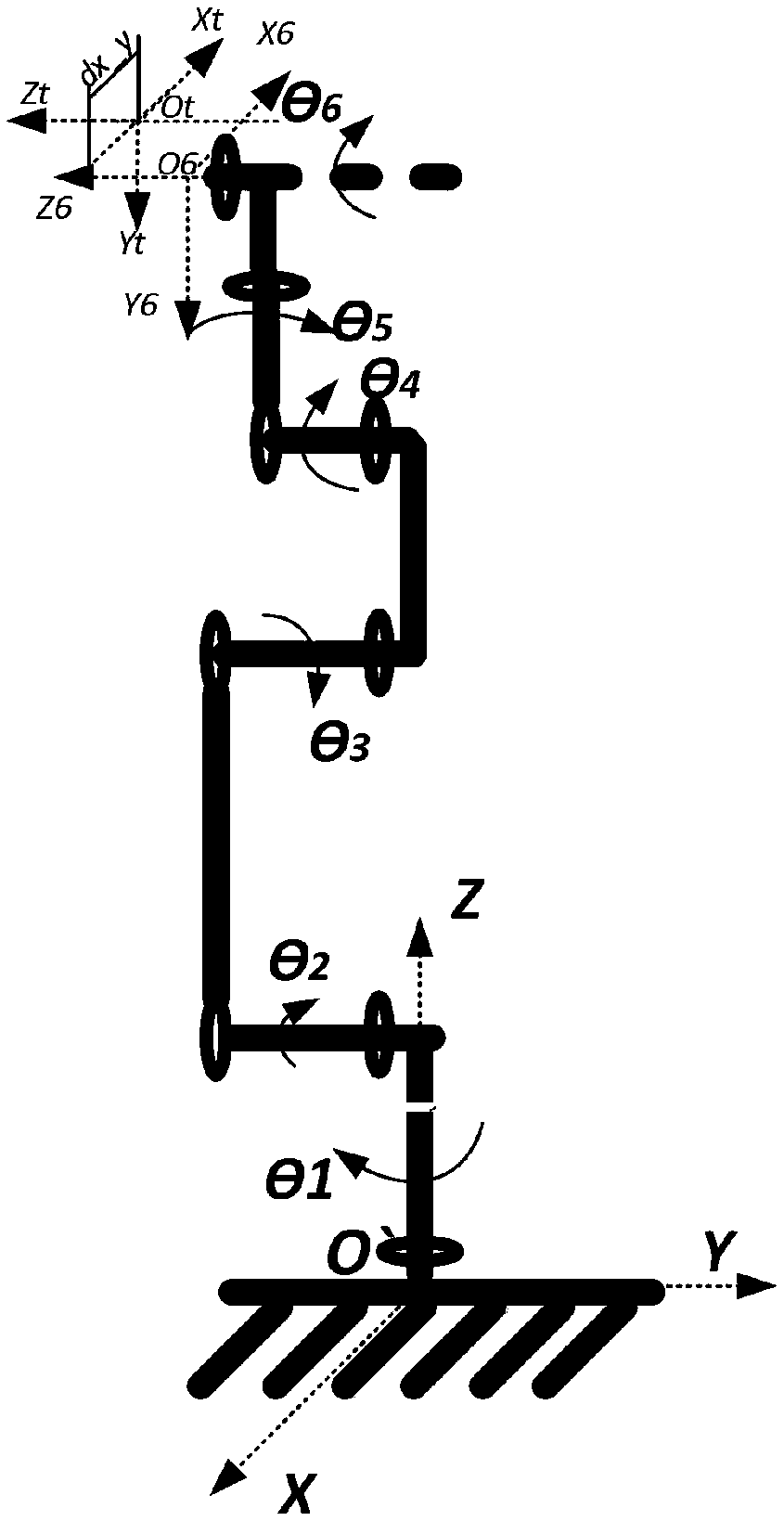
[0028] Please refer to figure 1 and figure 2 , an embodiment of the present invention provides a method for testing the load on the tool end of a robot, the robot includes six joints connected in sequence, respectively the first joint θ 1 ~6th joint θ 6 , each joint is equipped with a drive motor to drive its rotation, the first joint θ 1 Fixed vertically on the base of the fixed body, the first joint θ 1 , the second joint θ 2 , the third joint θ 3 does not rotate, the initial state of the robot is in the zero state, and in the zero state, the second joint θ 2 , the third joint θ 3 , the fourth joint θ 4 and the sixth joint θ 6 are in a horizontal state, the fifth joint θ 5 in a vertical position.
[0029] Described test method specifically ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More