

Four-wheeled independently steered and driven telescopic field operation robot platform
A four-wheel independent steering and field operation technology, which is applied in the steering mechanism, electric steering mechanism, power steering mechanism, etc., can solve the problems affecting the working parameters and performance of the robot, the change of the front and rear wheelbase of the robot, etc., and achieve flexible and convenient movement adjustment , Width adjustment process smooth effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings.
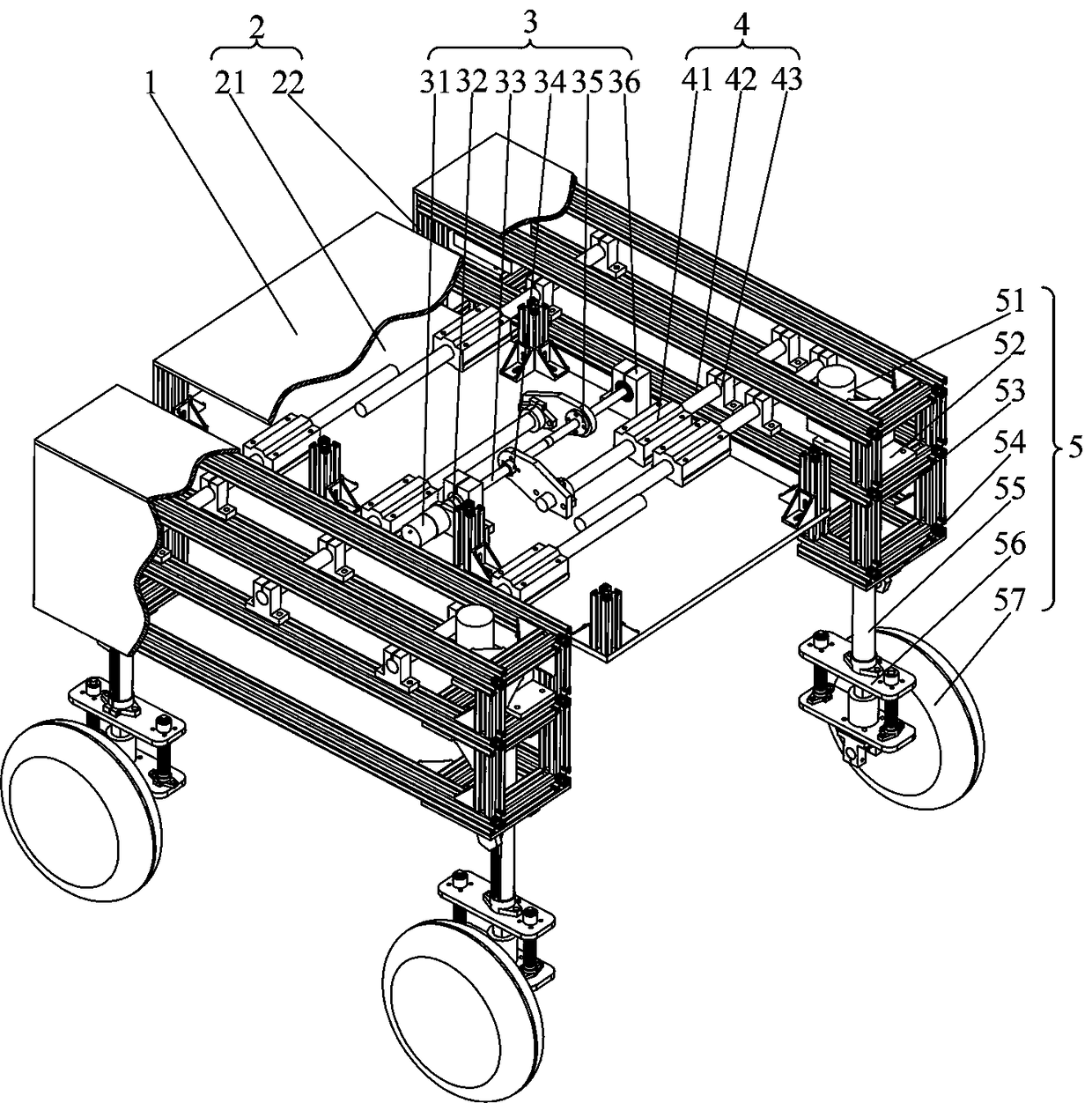
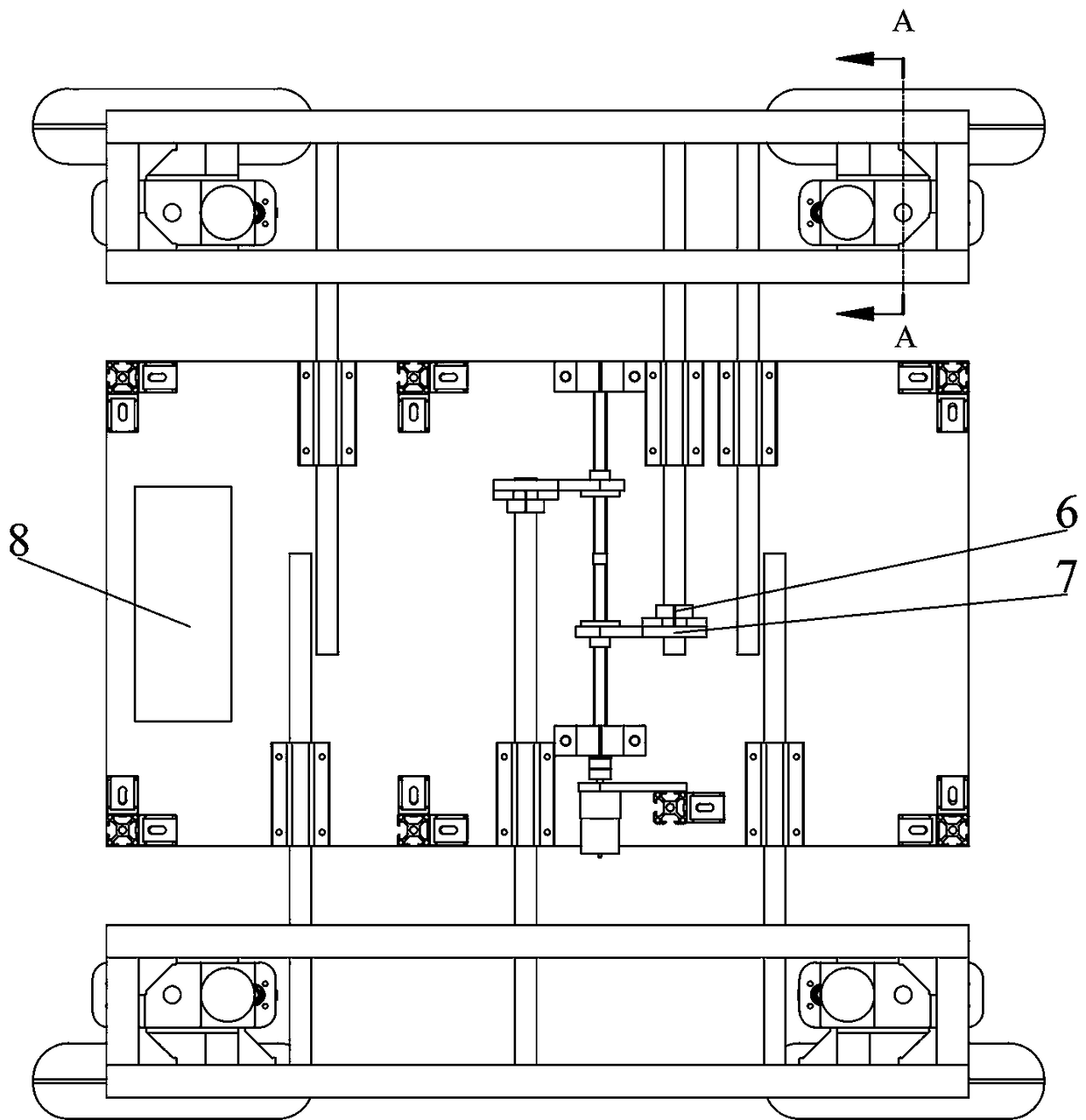
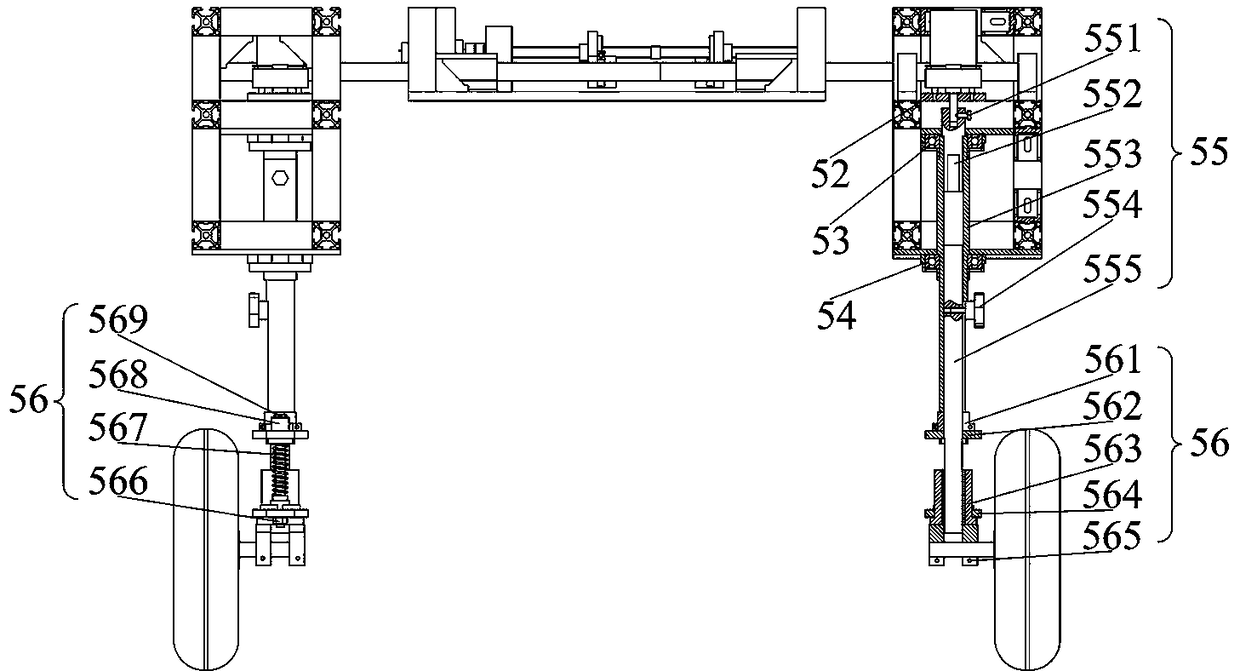
[0019] Such as Figure 1 to Figure 3 As shown, a telescopic field robot platform driven by four-wheel independent steering in the present invention is composed of a frame 2, a width adjustment mechanism 3, a frame connection mechanism 4, a steering walking assembly 5, and a motion control system 8. The frame 2 is a telescopic split frame, including an upper frame 21 and a side frame 22 , and the side frames 22 are two, symmetrically arranged on both sides of the upper frame 21 . Width adjustment mechanism 3, frame connection mechanism 4 and motion control system 8 are installed on the upper frame, and described steering assembly 5 is 4 sets, is installed in the front end and the rear end of side frame 22 on both sides respectively.
[0020] Width adjustment mechanism 3 is made up of motor 31, shaft coupling 32, forward and reverse screw mandrel 33, forward rotation fl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More