

A 3D Visual Scalp Craniotomy Positioning Method Combined with Optical Surgical Navigation
A technique of surgical navigation and positioning method, which is applied in the field of 3D visualization scalp craniotomy positioning combined with optical surgical navigation, and can solve the problems of large angle between surgical tools and scalp, inaccurate incision design, and inability to delineate and correct results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with specific examples.
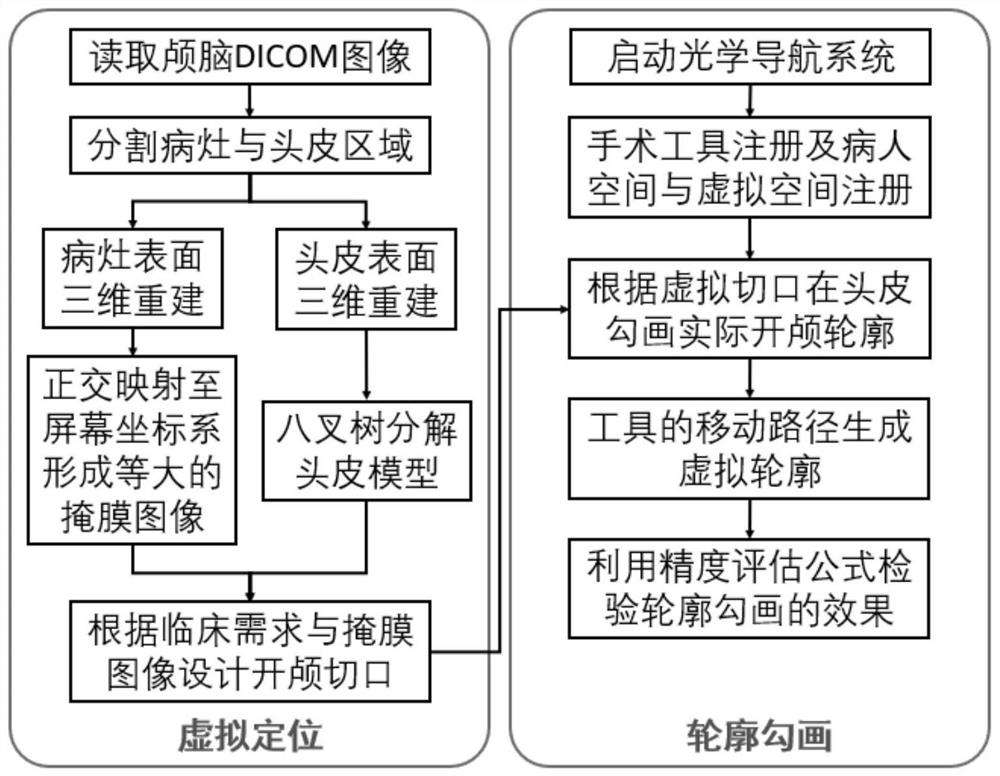
[0036] Such as figure 1 As shown, the three-dimensional visual scalp craniotomy positioning method combined with optical surgical navigation provided in this embodiment includes the following steps:
[0037] 1) Obtain two-dimensional medical image slices from the imaging device, segment the scalp and lesion area in the image, reconstruct the scalp and the lesion to construct a three-dimensional model, and the specific steps are:
[0038] 1.1) Read the two-dimensional slice image of the brain;
[0039] 1.2) Anisotropic filtering is used to process the slice image, which not only removes noise information, but also retains edge details;
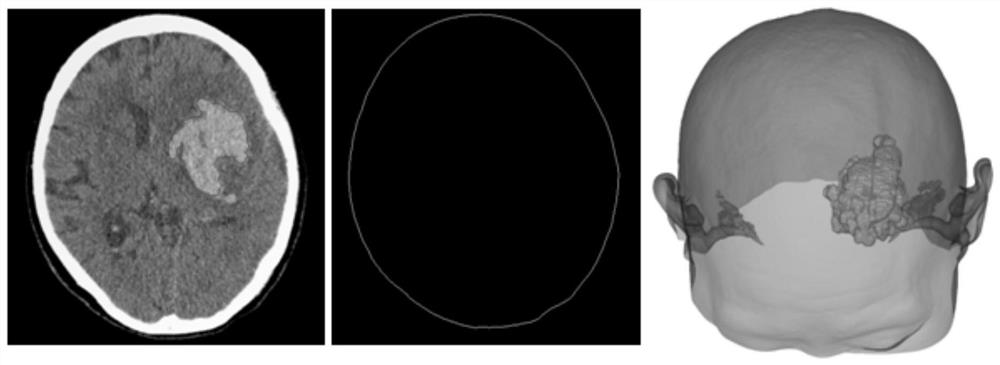
[0040] 1.3) According to the CT value of the scalp, use the threshold method to quickly extract the scalp contour of each slice. The lesion is first down-sampled to a low-resolution image through the image pyramid algorithm, and then the ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More