

Robot walking route automatic obstacle avoiding method and system and robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment approach
[0044] Further, according to the value division of the control signal, the above step (2), that is, an implementation mode in which the control module controls the drive module or / and the steering module through the processor according to the control signal, is as follows:
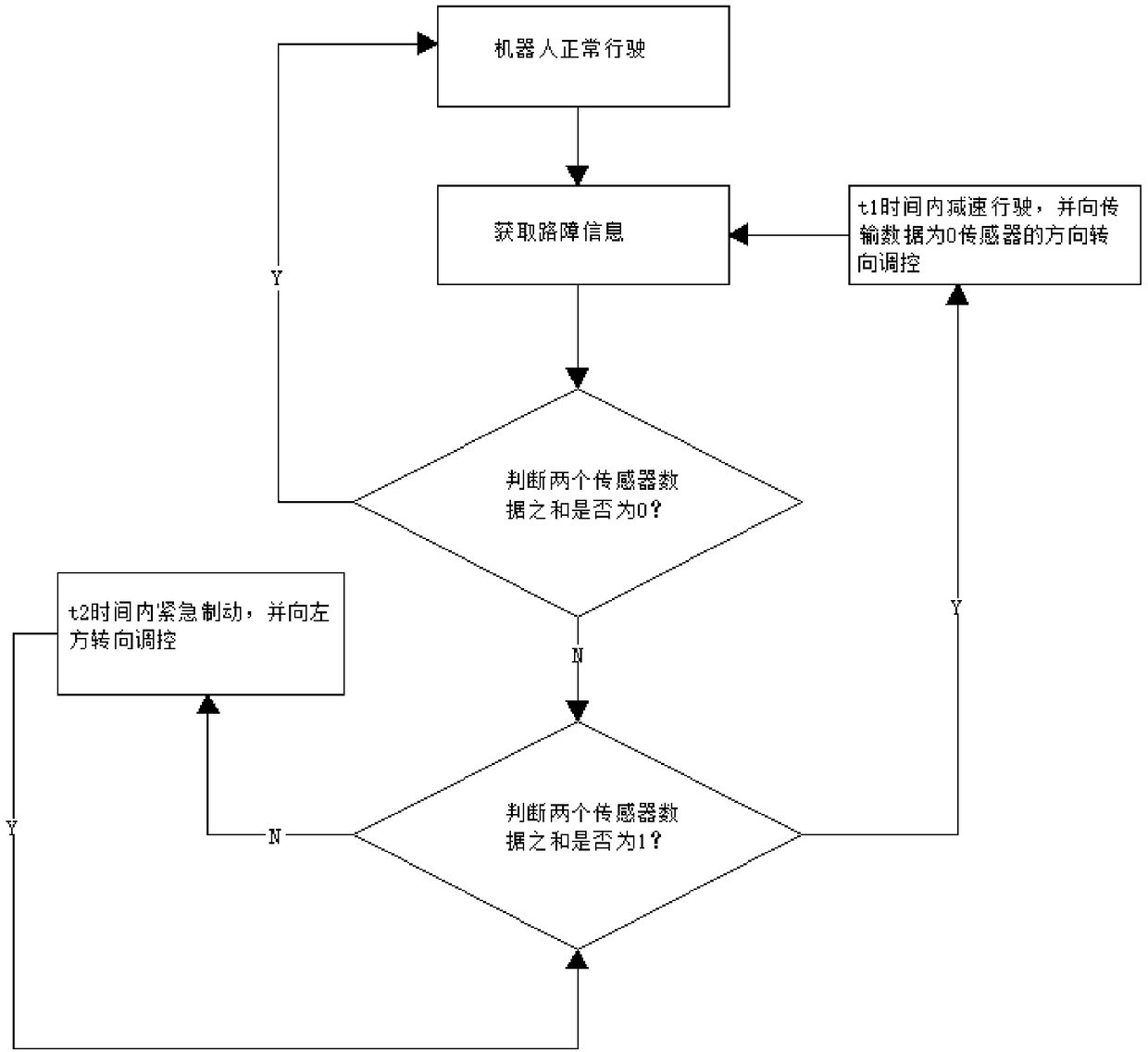
[0045] When the control signal is 0, the control module controls the drive module through the processor to maintain a preset normal walking state.
[0046] When the control signal is 1, the control module controls the drive module through the processor to maintain the preset deceleration and slow travel state within the preset first time period, and controls the steering module to take the values of the data in the first sensor and the second sensor to be 0 Rotate in the corresponding direction until the control signal turns to 0, control the steering module to stop rotating, and control the drive module to enter the preset normal walking state.
[0047] When the control signal is 2, the control module c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More