

Hexapod robot motion control algorithm
A technology of robot motion and hexapod robot, applied in the field of robot motion control, can solve problems such as sideslip and joint damage of the body, and achieve the effect of reducing the possibility of sideslip, reducing joint damage, and increasing the stability of the body
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] A hexapod robot motion control algorithm is characterized in that it comprises the following steps:
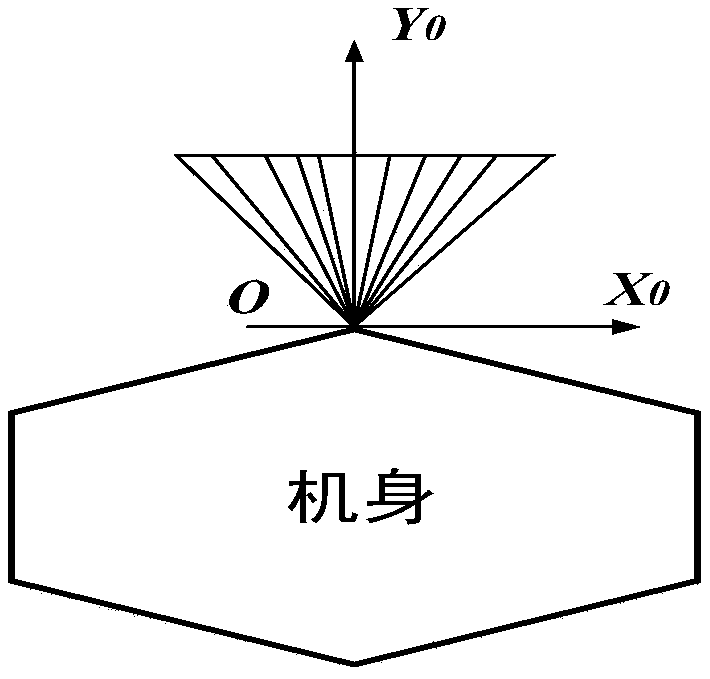
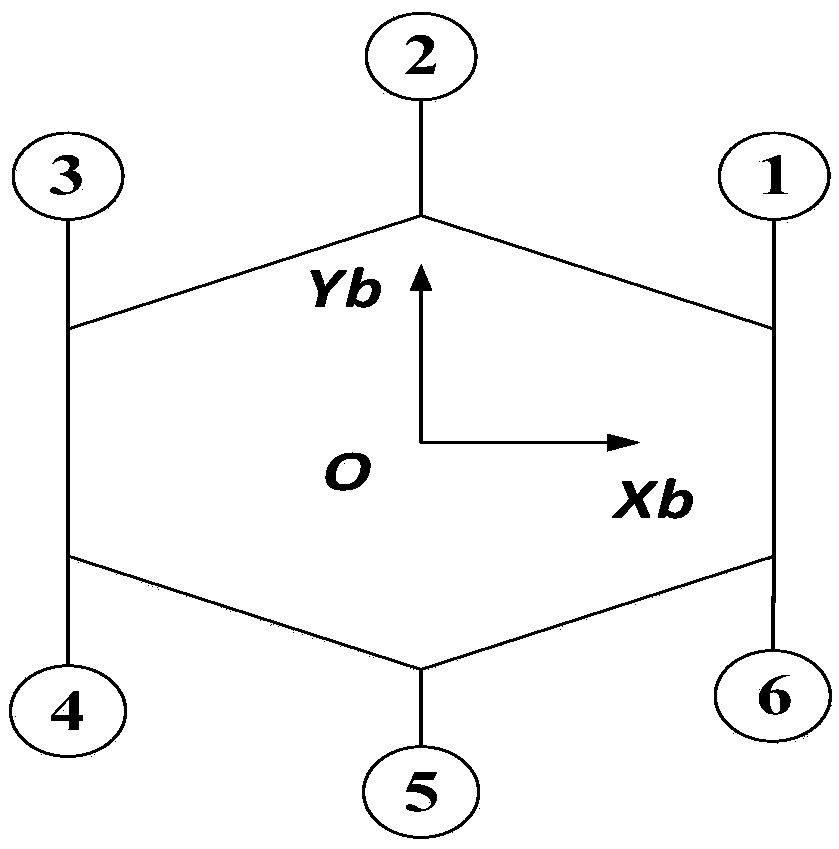
[0035] Step 1, according to the appearance of the robot structure, combined with the method of establishing the coordinate system, establish the body coordinate system;
[0036] Step 2, establish a coordinate system for a single walking leg;
[0037] Step 3, foothold selection, that is, the distance D projected from the foot end of each leg to the heel joint in the direction of motion when walking in the supported state. Determine an appropriate distance according to the robot's own parameters and motion parameters. Once the distance is determined, when the robot advances or retreats, the projection of the distance between the foot end of each leg and the heel joint in the forward or backward direction is the fixed value.
[0038] Step 4, the inverse kinematics solution when the body is moving, using coordinate transformation to establish the corresponding relationship...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More