Hexapod robot foot end trajectory planning method based on hexapod polynomial
A hexapod robot and trajectory planning technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve the problems of stable legs and feet, damage, inability to maintain the body, etc., to improve real-time performance and reduce the possibility of sideslip The effect of increasing the stability of the body
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In describing the present invention, it should be understood that the terms "center", "longitudinal", "transverse", "length", "width", "thickness", "upper", "lower", "front", " Orientation indicated by rear, left, right, vertical, horizontal, top, bottom, inside, outside, clockwise, counterclockwise, etc. The positional relationship is based on the orientation or positional relationship shown in the drawings, which is only for the convenience of describing the present invention and simplifying the description, rather than indicating or implying that the referred device or element must have a specific orientation, be constructed and operated in a specific orientation, Therefore, it should not be construed as limiting the invention.
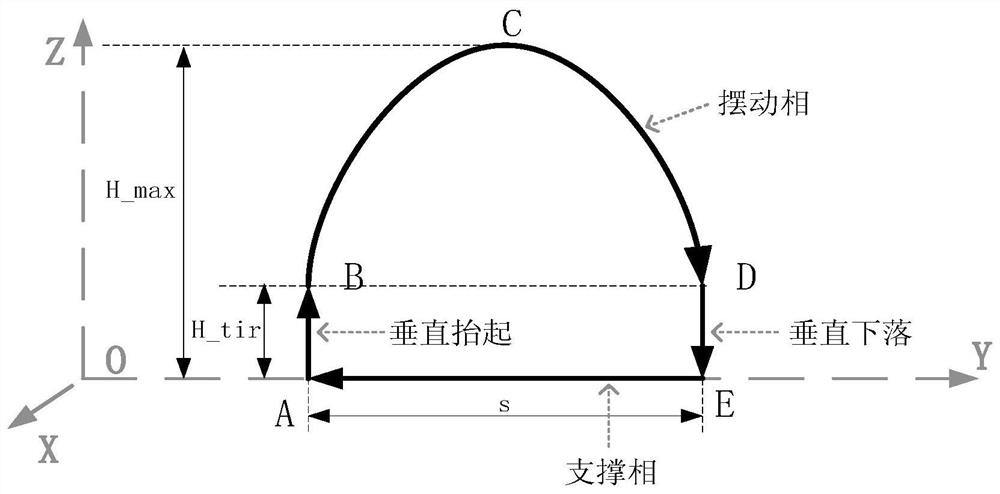
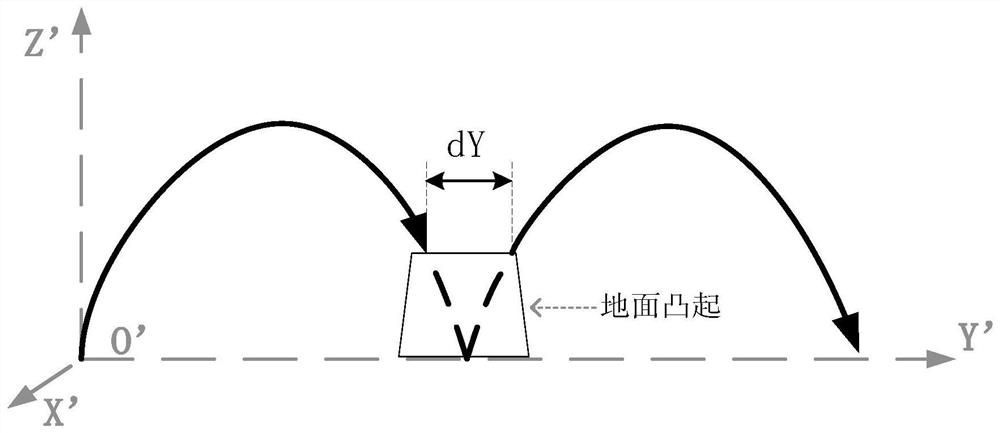
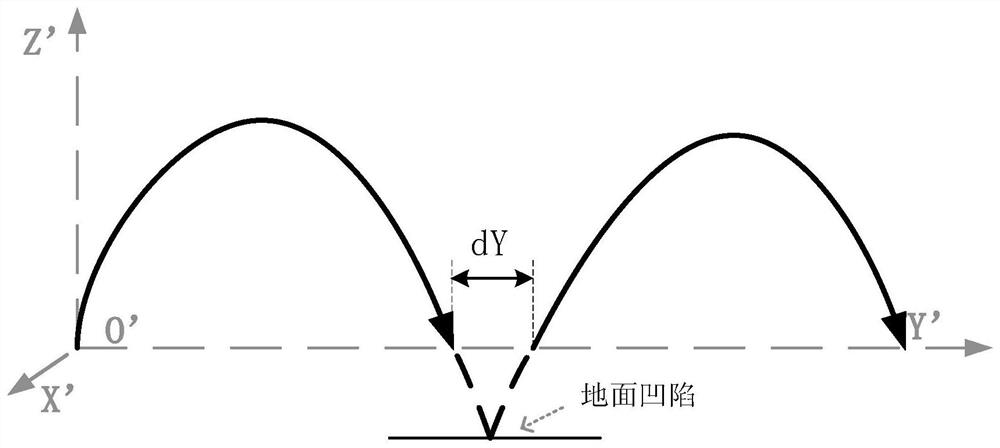
[0050] see Figure 1-Figure 3 , the object of the present invention is to provide a general hexapod robot trajectory planning algorithm that meets the requirements of the crawling task, including the stability of the body during the crawlin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More