

A method and apparatus for aligning three-dimensional point clouds
A 3D point cloud and point pairing technology, applied in the field of data processing, can solve problems such as inaccurate relative poses, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
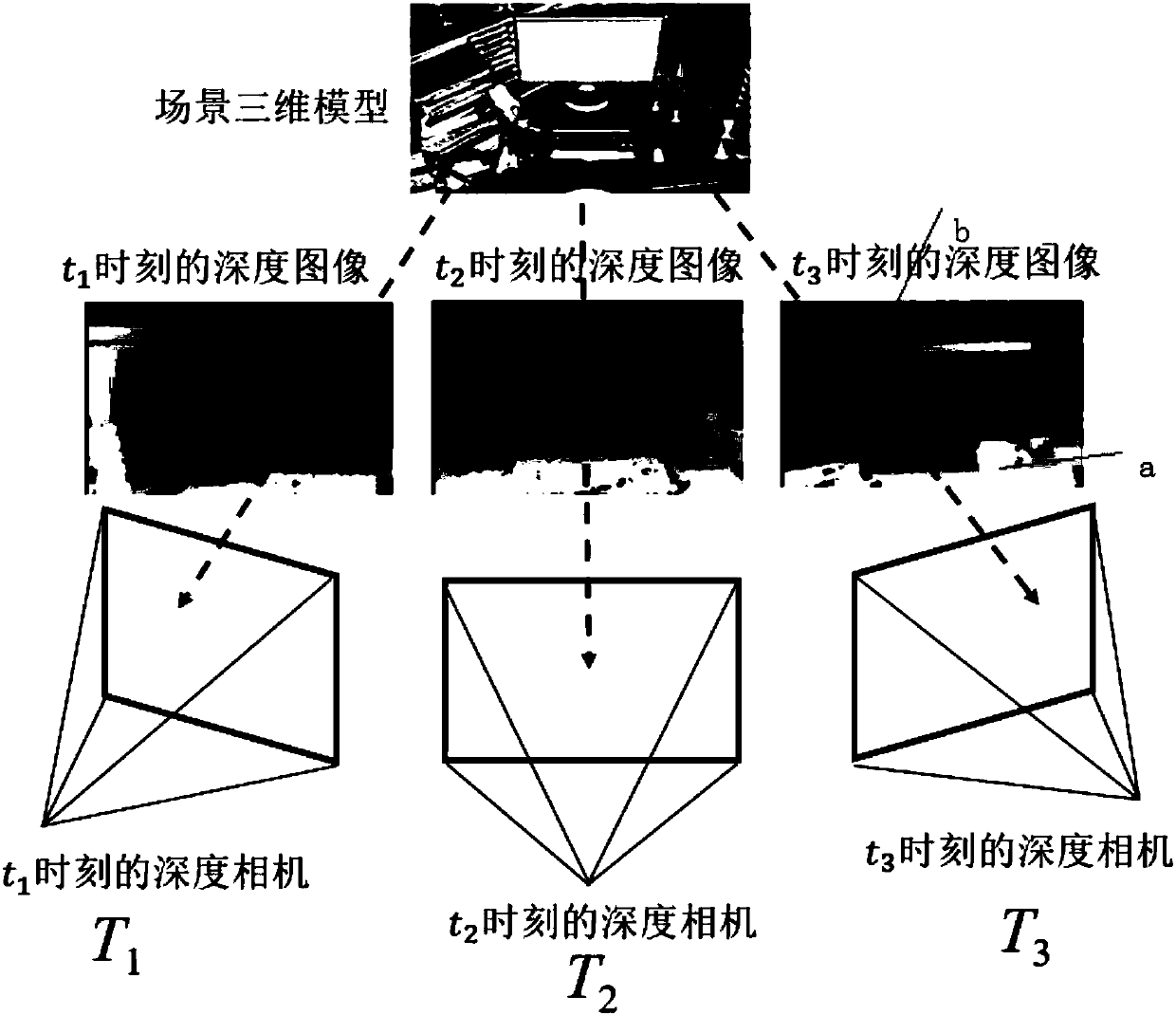
[0034] In recent years, the ICP algorithm has been widely used in real-time simultaneous localization and mapping (SLAM) applications such as real-time 3D reconstruction, augmented reality, mixed reality and robotics due to its simple, fast and effective characteristics. Applications. Taking the application of ICP algorithm in the real-time 3D reconstruction application scene as an example to illustrate the application scene of ICP algorithm: the user uses the depth camera to scan the target scene to be reconstructed, and at different times t 1 , t 2 , t 3 , the cameras are in different poses (respectively denoted as T1, T2, T3), and facing the target scene at different angles, so the depth cameras capture three depth images at different moments, such as figure 1 shown; then, the depth image is back-projected to the three-dimensional space to obtain the three-dimensional point cloud of the target scene at different angles of view; then, the point cloud at different times is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More