

A climbing mechanism, a climbing intelligent inspection robot and a climbing method for a substation
An inspection robot and intelligent inspection technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve problems such as difficulty in meeting the requirements of power supply quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
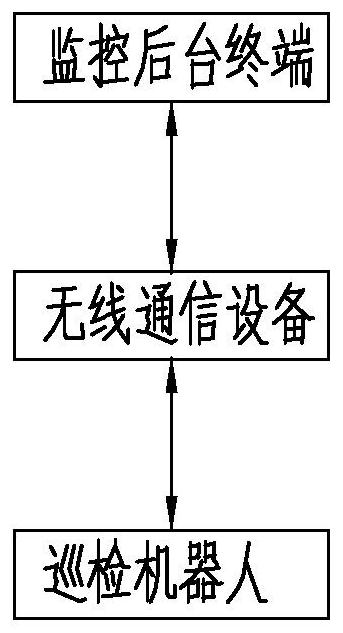
[0054] see Figure 1-3 , an intelligent inspection system for substations, including monitoring background terminals, wireless communication equipment and inspection robots,
[0055] The monitoring background terminal is the data reception, processing, display and storage center of the entire inspection system. It realizes remote control and data transmission through wireless communication equipment and inspection robots, and realizes automatic identification, inspection and alarm of substation equipment.
[0056] The monitoring background terminal mainly includes an application unit, a functional service unit, an interface communication unit and a database. ,
[0057] The application unit provides various application operations according to the substation inspection business needs. The specific functions of the application unit can be configured according to the needs. The main application content includes: inspection video display, substation electronic map display, inspect...
Embodiment 2
[0112] For the specific work on the ground plane, this embodiment sets up a corresponding magnetic trajectory navigation intelligent inspection robot and its navigation method.
[0113] see Figure 4 to Figure 8 , a magnetic trace navigation intelligent inspection robot, including a robot body 1, a plurality of straight magnetic traces 2, a plurality of arc magnetic traces 3, an RFID tag and an RFID identifier 4, and the straight magnetic traces 2 are connected to the arc The shape line magnetic trajectory line 3, the straight line magnetic trajectory line 2 and the arc line magnetic trajectory line 3 are connected to each other to form the walking circuit of the inspection robot. By setting a plurality of linear magnetic trajectory lines 2 and a plurality of arc-shaped magnetic trajectory lines 3, an inspection route is laid to prepare for the inspection work in the ground flat area.
[0114] The robot body 1 is provided with an RFID identifier 4, and the sides of the linear...
Embodiment 3
[0132] Aiming at the specific ground obstacle surmounting work, this embodiment sets up the corresponding obstacle surmounting mechanism, the obstacle surmounting intelligent inspection robot and its substation obstacle surmounting method.
[0133] see Figure 9 , Figure 10 and Figure 11 , a kind of obstacle surmounting mechanism, comprises machine base 18 and obstacle escaping arm 19, and obstacle escaping arm 19 is provided with four, and obstacle escaping arm 19 is arranged on four corners of machine base 18, and obstacle escaping arm 19 includes obstacle escaping outer Arm 20 and telescopic arm 21, the inner wall of barrier-crossing outer arm 20 is provided with guide rail 22, and guide rail 22 is connected with guide slider 23, and guide slider 23 is connected with screw mandrel module, and screw mandrel module is connected with The telescopic arm 21 and the screw mandrel module can drive the telescopic arm 21 to perform telescopic movement.
[0134] Specifically, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More