

Tightly coupled binocular vision-inertial SLAM method using combined point-line features
A binocular vision and feature fusion technology, which is applied in navigation, instrumentation, surveying and navigation, etc., can solve problems affecting algorithm accuracy, algorithm failure, and decrease in accuracy of visual-inertial fusion algorithm, so as to improve the working environment and enhance the robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with specific embodiment, further illustrate the present invention. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
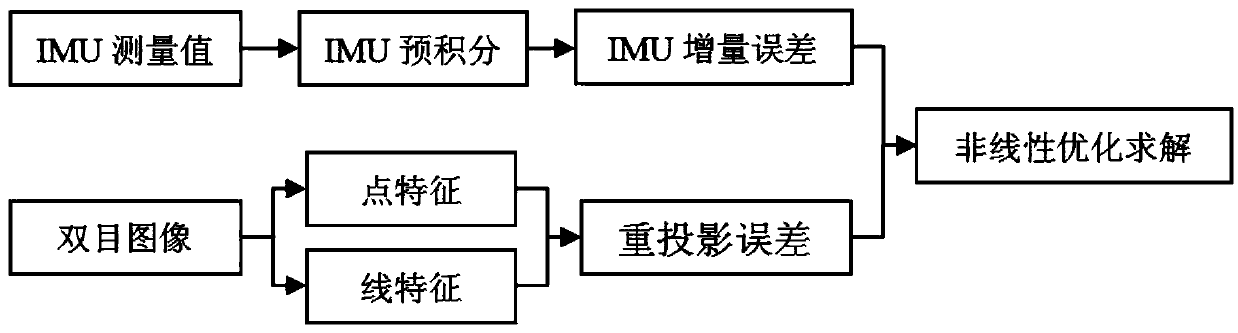
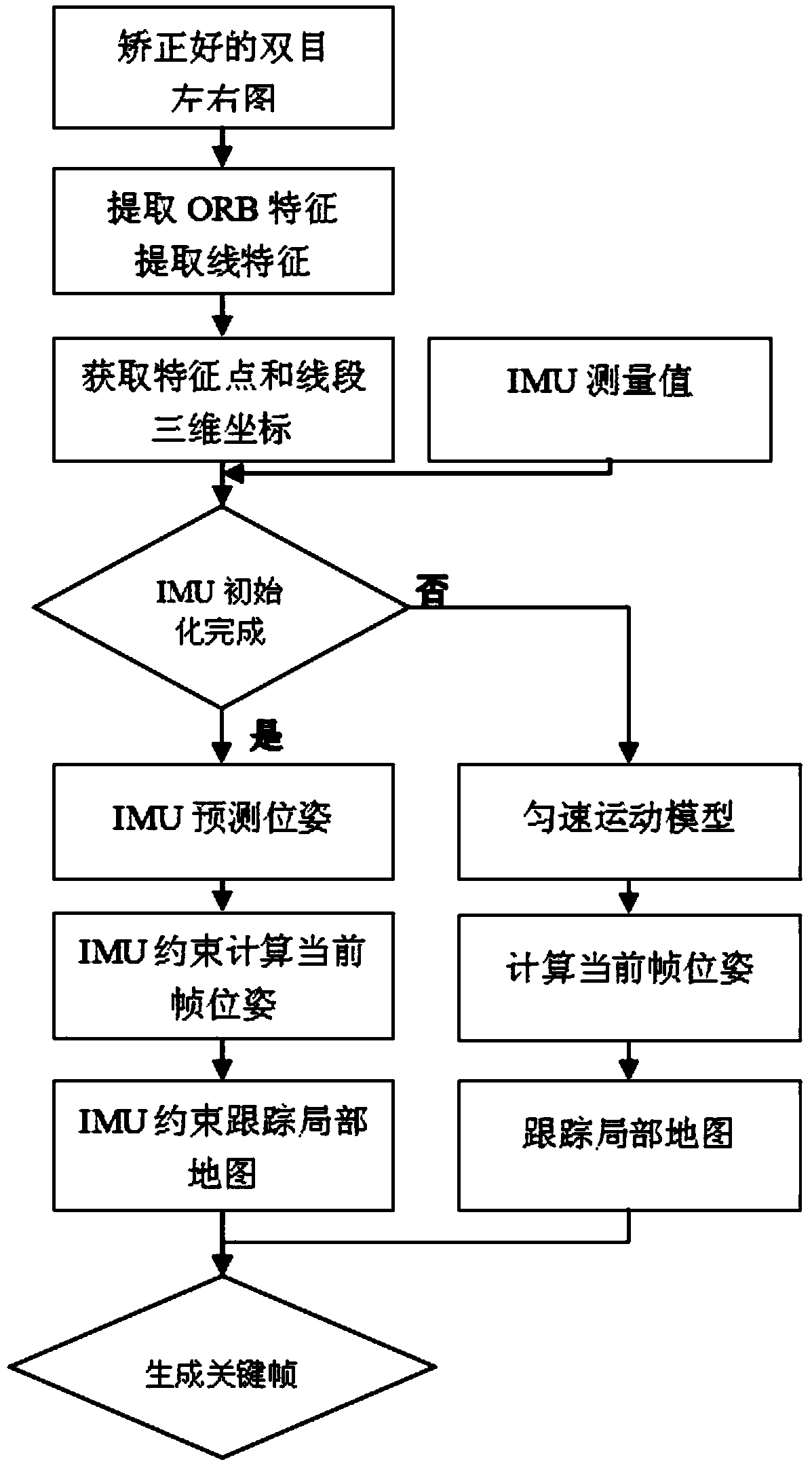
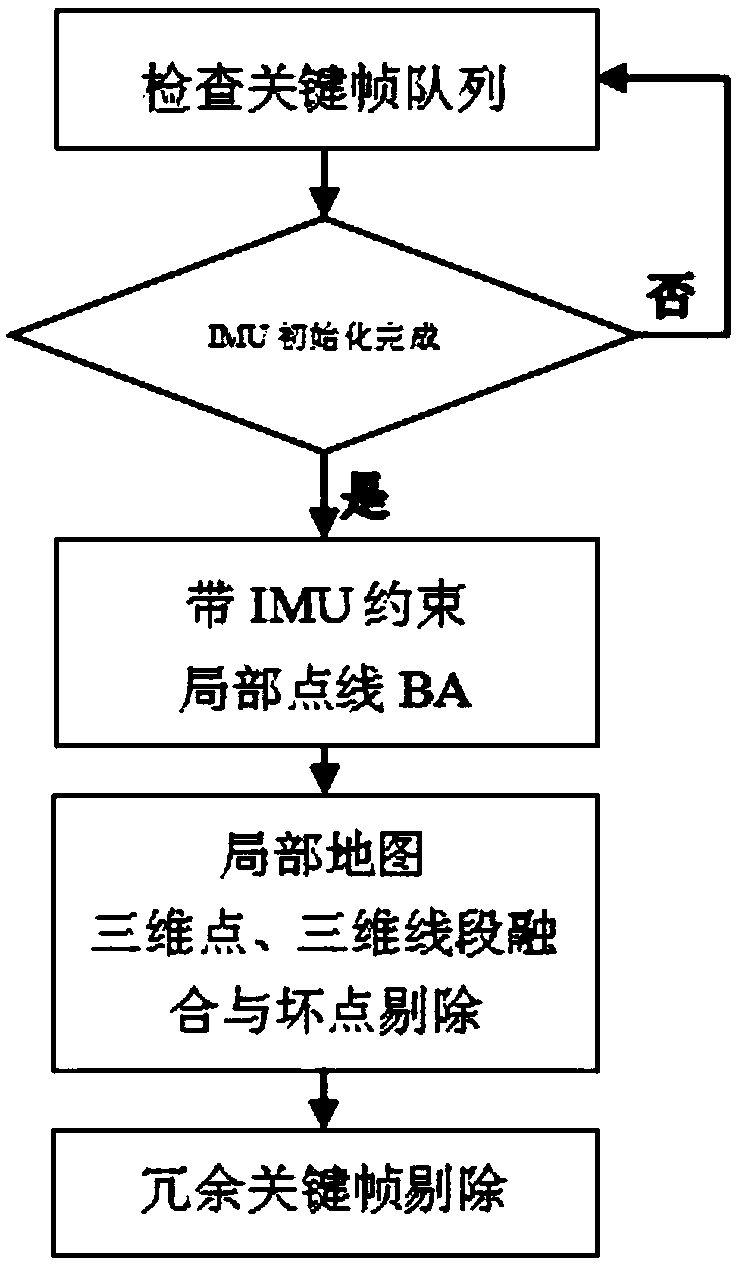
[0021] The embodiment of the present invention relates to a tightly coupled binocular visual-inertial SLAM method for point-line feature fusion. This method is an extension and improvement of the traditional SLAM method, such as figure 1 As shown, it extracts image point features and line features and performs feature matching to determine the feature data association, and solves the pose and constructs a 3D map of point and li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More