

Multi-degree-of-freedom parallel mechanism
A degree of freedom and parallel technology, applied in the field of robotics, can solve the problems of small operating space, difficult to arrange multiple robots at the same time, large size of robots, etc., and achieve the effect of high space utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
[0050] refer to Figure 1 to Figure 3 First, the first embodiment of the five-degree-of-freedom parallel mechanism of the present invention is introduced.
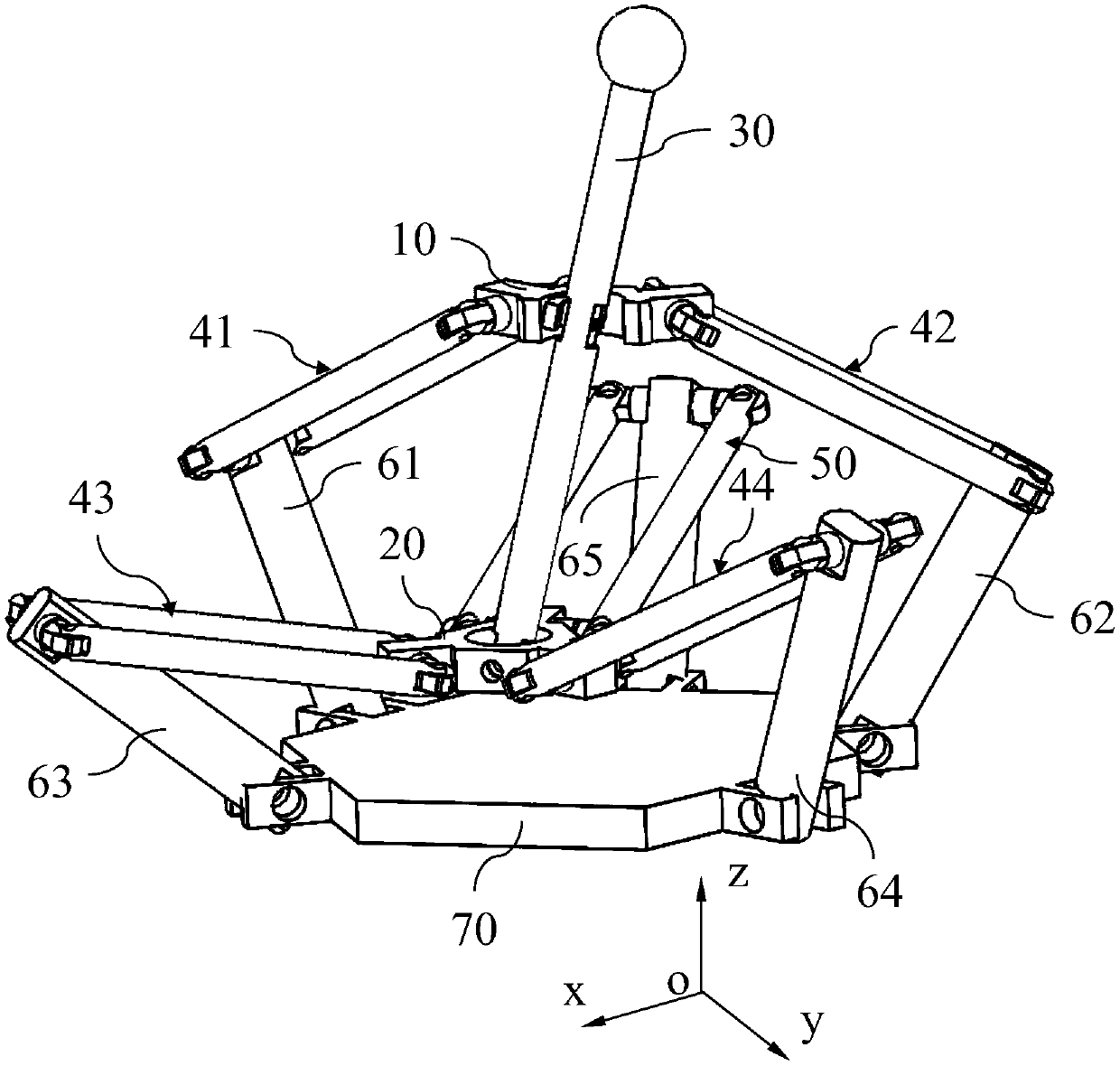
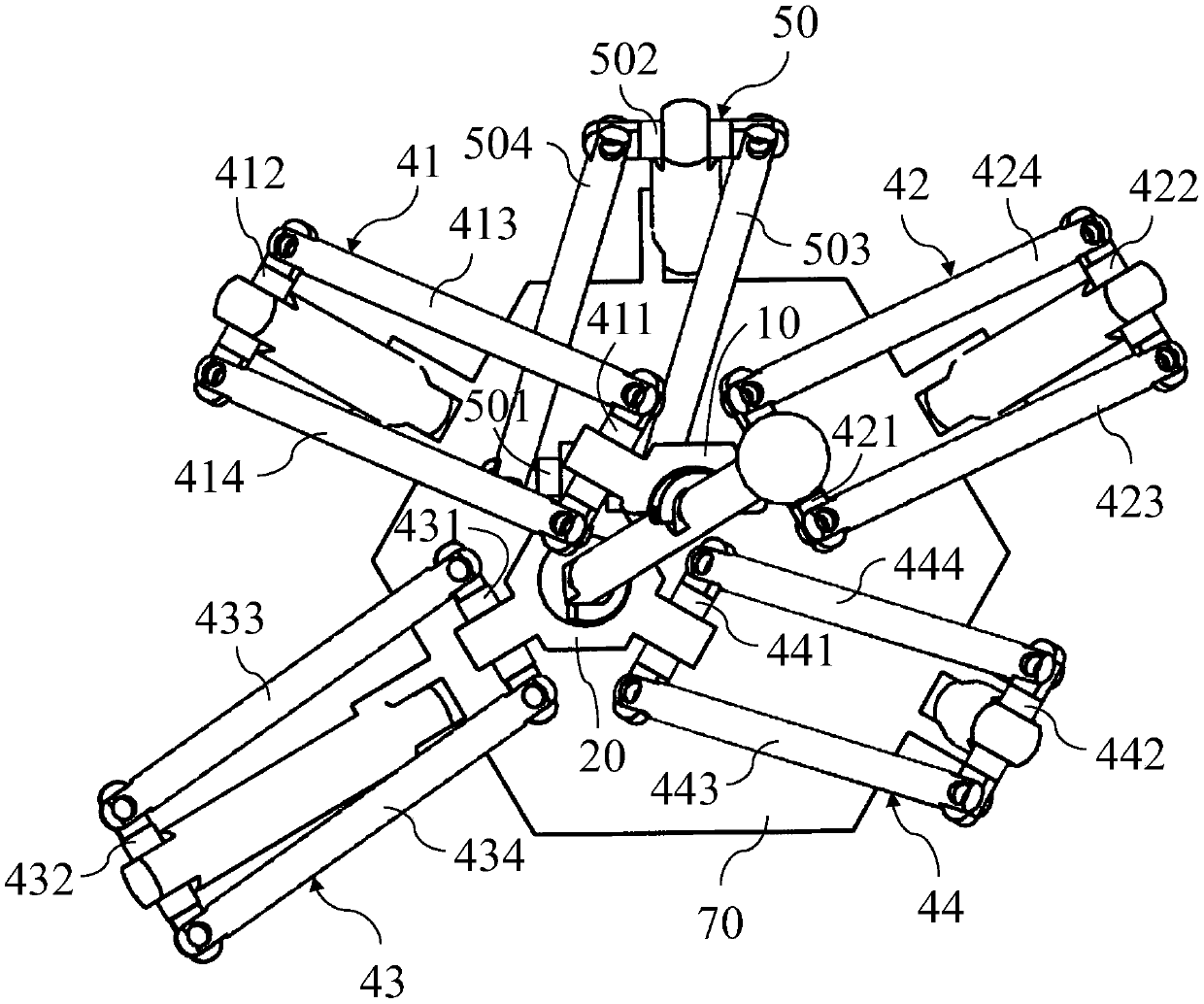
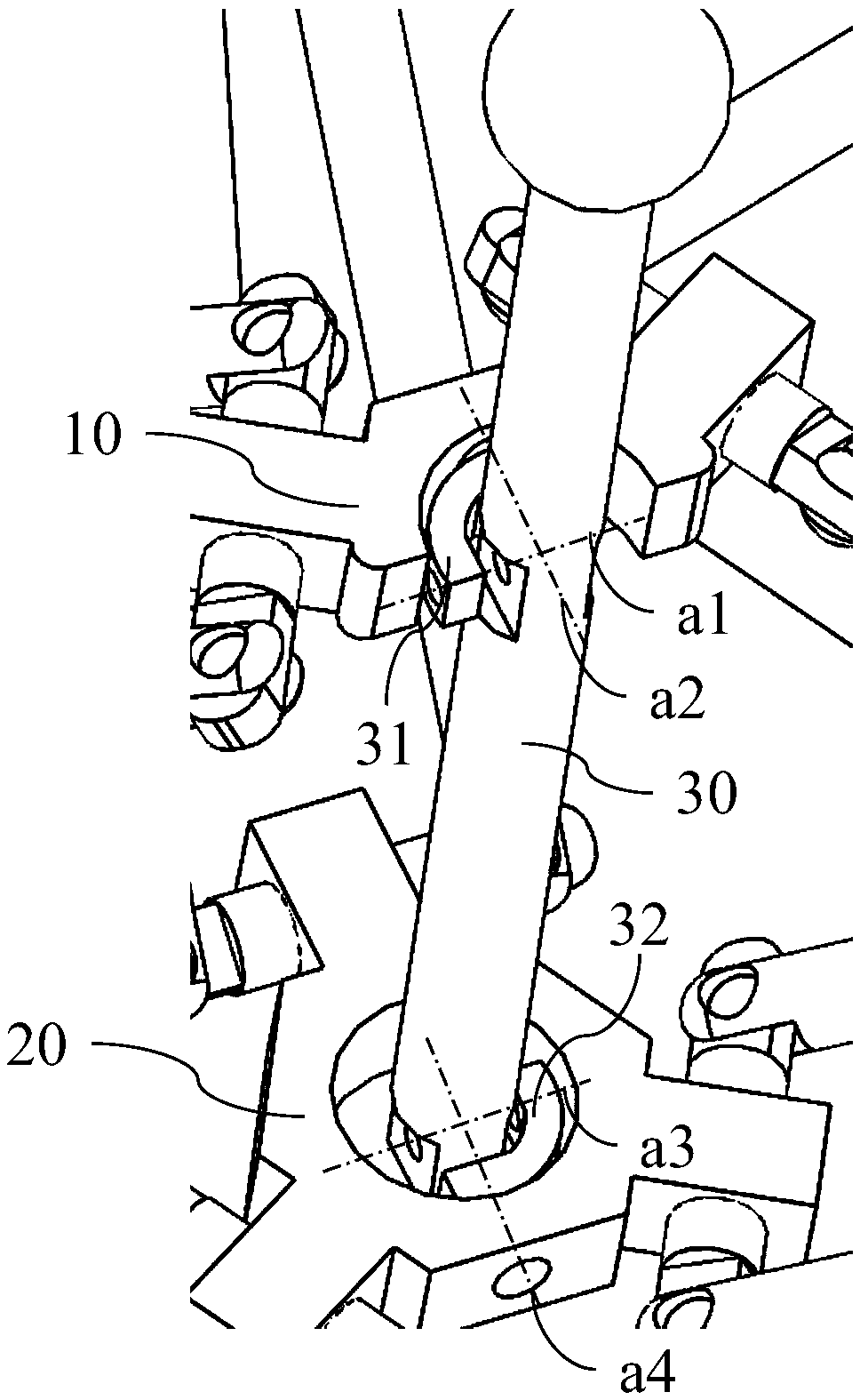
[0051] refer to figure 1 and figure 2 , the five-degree-of-freedom parallel mechanism according to the first embodiment of the present invention includes a first platform 10 , a second platform 20 and a connecting member 30 . The first platform 10 is supported and guided by the first support assembly 41 and the second support assembly 42 and has translational degrees of freedom in the three directions of x, y and z. The second platform 20 is supported by the third support assembly 43, The support and guidance of the fourth support assembly 44 and auxiliary positioning assembly 50 have translational degrees of freedom in the three directions of x, y and z. The connecting member 30 is respectively connected to the first platform 10 and the second platform 20, and during the movement of the first platform 10 and / or the se...
no. 2 approach
[0074] Figure 4 A five-degree-of-freedom parallel mechanism according to a second embodiment of the present invention is shown. The second embodiment is a modification of the first embodiment, and the same or similar reference numerals are assigned to the same or similar components as those of the first embodiment, and detailed descriptions of these components are omitted.
[0075] In this embodiment, the movement mode of the fifth movable member 65 connected with the auxiliary positioning assembly 50 relative to the base 70 is translational movement. The base 70 includes an auxiliary guide 71 extending along the z direction, and the fifth movable part 65 can reciprocate along the auxiliary guide 71 to change the displacement of the fifth movable part 65 relative to the base 70 in the z direction.
[0076] It should be understood that the auxiliary guide 71 may not extend along the z direction, and the auxiliary guide 71 only needs to have an extension component in the z dir...
no. 3 approach
[0078] Figure 5 A five-degree-of-freedom parallel mechanism according to a third embodiment of the present invention is shown. The third embodiment shows another modification of the auxiliary positioning assembly 50 and the movable member.
[0079] In this embodiment, the auxiliary positioning assembly 50 does not have a parallelogram mechanism, and is mainly composed of a rod-shaped support rod 51 and adapters 511 connected to both ends of the support rod 51 . The auxiliary positioning assembly 50 can omit the parallelogram mechanism because the third support assembly 43 and the fourth support assembly 44 with the parallelogram mechanism can already determine the attitude of the second platform 20 parallel to the xoy plane, and the role of the auxiliary positioning assembly 50 The main purpose is to determine the position of the second platform 20 in the z direction.
[0080] The support rod 51 is a telescopic rod with adjustable length, and the distance between the second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More