

Composite track tracking control method for unmanned underwater vehicle
An underwater vehicle and control method technology, applied in three-dimensional position/channel control, adaptive control, general control system and other directions, can solve the problems of uncertain fluid disturbance, difficult control system design, etc., to simplify design and improve tracking performance, the effect of eliminating chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
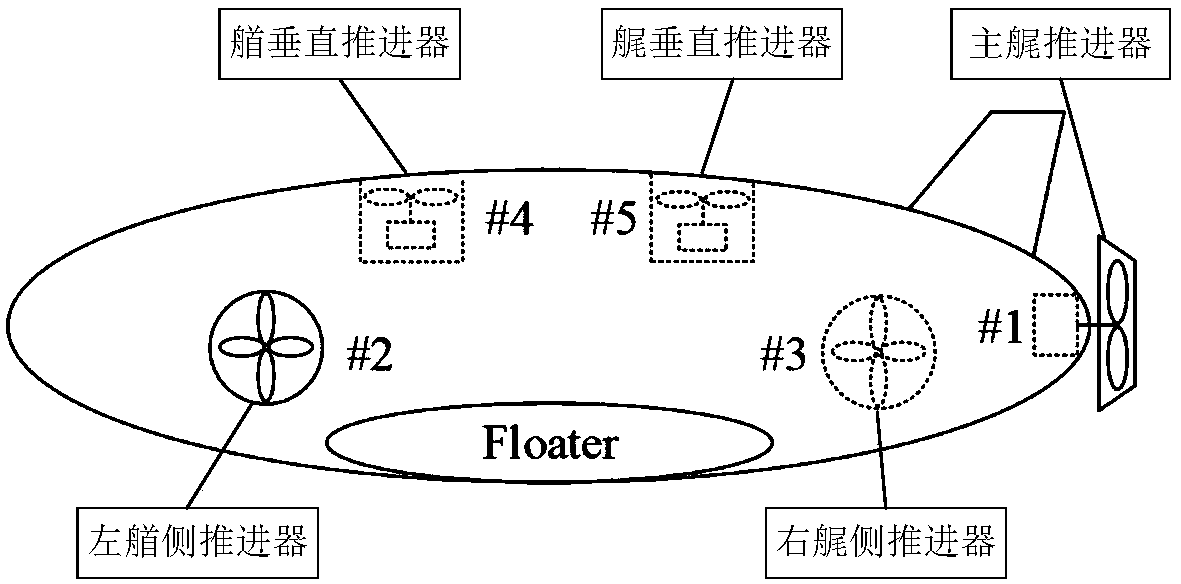
[0063] In order to better determine the position, attitude and speed of the UUV, and then study the motion law of the UUV, it is necessary to establish a model suitable for describing the motion of the UUV. Considering the complexity of the unmanned underwater vehicle and the time-varying and random nature of the underwater environment, combined with the mechanism modeling, the simulation model controlled in this paper is a low-speed unmanned underwater vehicle propelled by five propellers. The configuration structure of the five propellers is as follows: figure 1 As shown, they are: main stern thruster, left bow thruster, right stern thruster, bow vertical thruster and stern vertical thrust...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More