

Distributed type hydraulic power source lower extremity exoskeleton robot
A technology of exoskeleton robot and hydraulic power source, which is applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of many power source components, complex system structure, and increased overall weight, so as to reduce retention loss, reduce control difficulty, The effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below with reference to the drawings and embodiments.
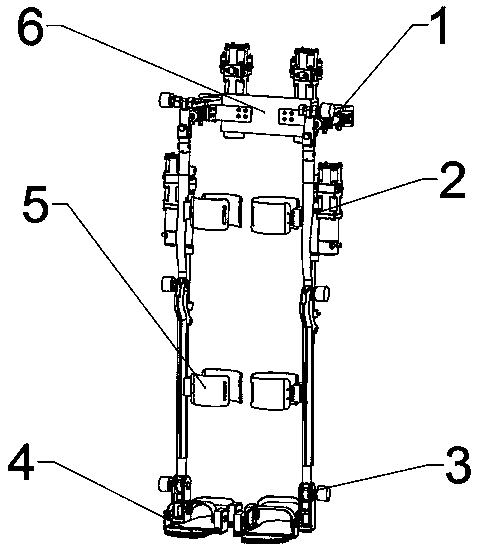
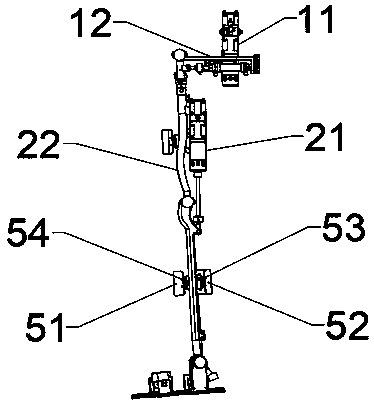
[0027] Such as figure 1 , image 3 , Figure 4 , Figure 5 As shown, the present invention includes: left and right lower limbs with the same structure, the upper left and right lower limbs are connected by a lower limb connector 6; the left and right lower limbs both include: hip joint component 1, knee joint component 2, ankle Joint component 3, foot wear device 4 and wear binding device 5; hip joint component 1 is connected to knee joint component 2 through hip joint swing bar 122, knee joint component 2 is connected to ankle joint component 3 through knee joint calf bar 222, ankle The joint component 3 is connected to the foot wearing device 4 through the ankle joint support 33, and the wearing binding device 5 is installed on both the hip joint swing bar 122 and the knee joint calf bar 222.
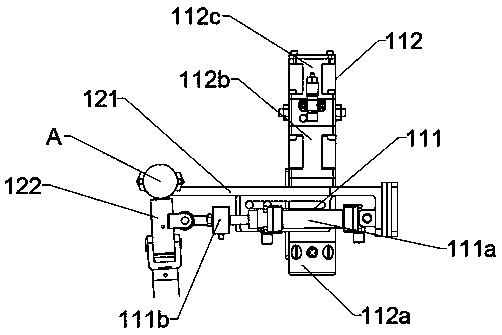
[0028] Such as figure 1 , image 3 , Figure 4 As shown, the hip joint compo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More