

Anti-falling device for high-altitude robot based on rotation in cooperation with gravity sensing
A technology of gravity sensing and robotics, which is applied in the field of anti-falling devices for high-altitude robots, can solve the problems of easily triggering gravity sensing, increasing the area under wind force, increasing energy consumption, etc., to increase the appearance volume, reduce the gravitational potential energy, and avoid the appearance volume Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
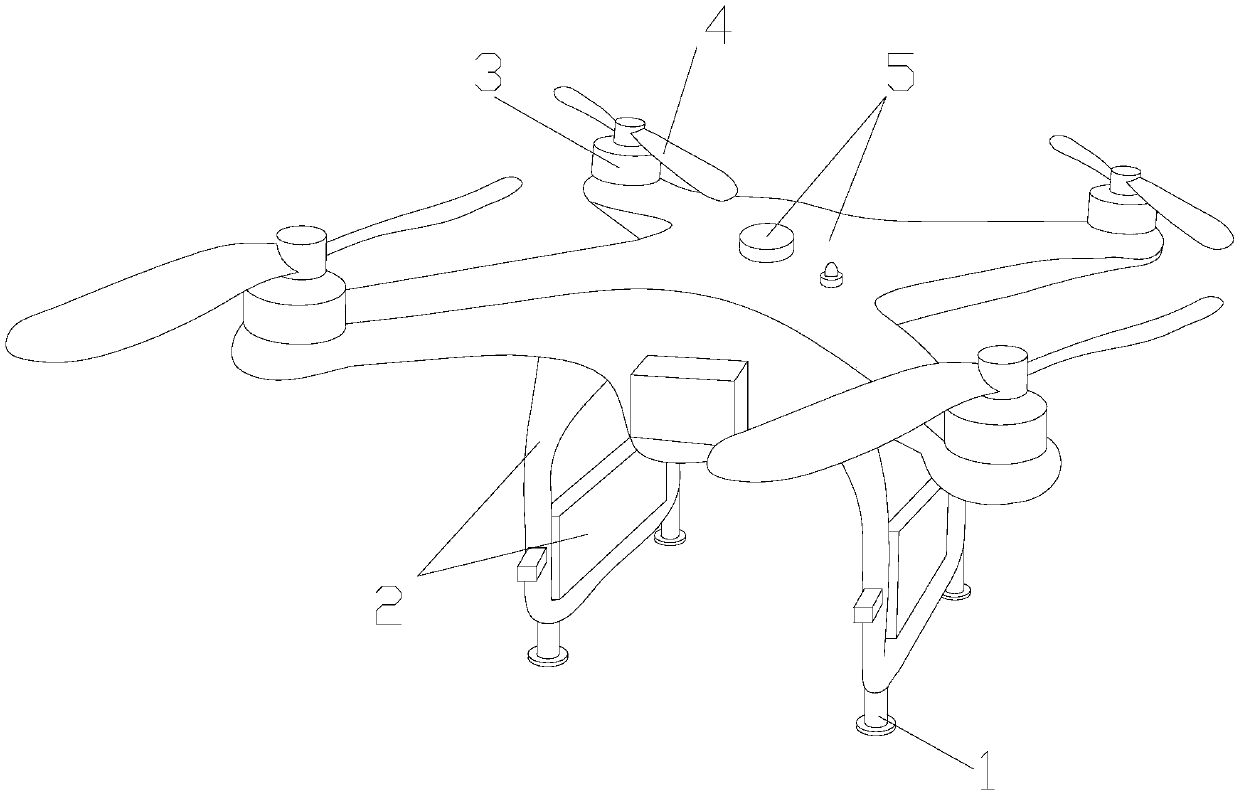
[0031] see figure 1 , the present invention provides a technical scheme of an anti-falling device for high-altitude robots based on rotation and gravity induction: its structure includes an anti-skid tripod 1, a bracket 2, a bearing connection seat 3, a rotating blade 4, and an induction anti-falling device 5. The anti-skid The top of the tripod 1 is fixedly connected to the bottom of the support 2 by screws, the top of the support 2 is fixedly connected to the bottom of the induction anti-falling device 5 by screws, and the four corners of the outer wall of the induction anti-falling device 5 are connected to the bottom of the bearing connection seat 3 by a slot. The top of the bearing connecting seat 3 is connected to the middle end of the rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More