Gait control method and device
A gait control and gait technology, applied in the field of robotics, can solve problems such as difficulty in ensuring walking stability and large head size.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
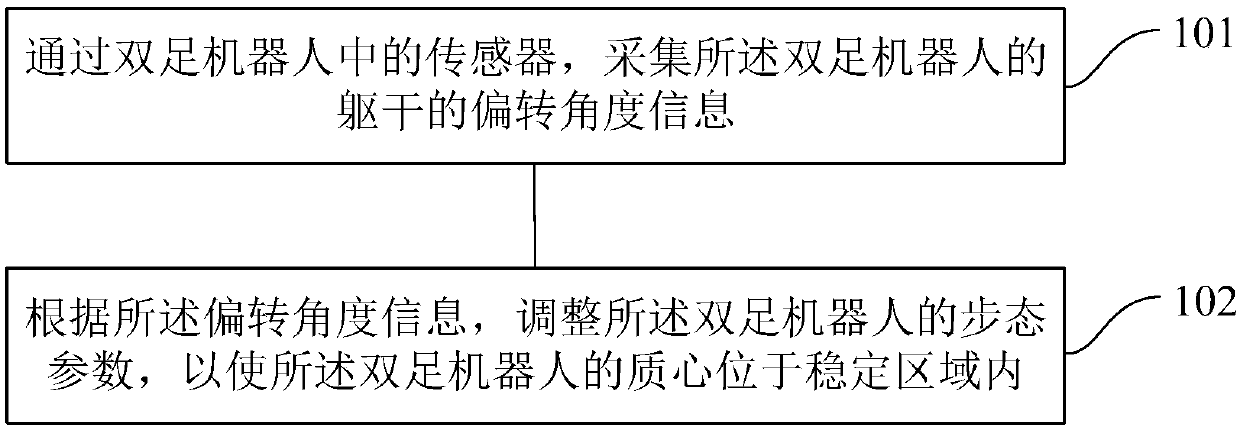
[0074] refer to figure 1 , which shows a flow chart of the steps of Embodiment 1 of a gait control method of the present invention, which may specifically include:
[0075] Step 101, collect the deflection angle information of the torso of the biped robot through the sensor in the biped robot;
[0076] Step 102. According to the deflection angle information, adjust the gait parameters of the biped robot so that the center of mass of the biped robot is located in a stable region.
[0077] The embodiments of the present invention are applicable to controlling the gait of the biped robot (hereinafter referred to as the robot for short) during the walking process of the robot, so as to realize the stable walking of the robot. Among them, gait refers to the movement process of each leg of the robot in a certain order and trajectory.
[0078] Usually, the gait parameters of the robot can be pre-planned, such as the height of the foot, the angle information of each joint, etc., so ...
Embodiment 2
[0103] In the embodiment of the present invention, a center-of-mass motion trajectory with relatively high walking quality and the gait parameters corresponding to the center-of-mass motion trajectory can be pre-planned. During the walking process of the robot, the robot is gaited according to the planned gait parameters. control, so that the actual trajectory of the center of mass of the robot approaches the pre-planned trajectory of the center of mass to ensure that the walking quality of the robot is high.
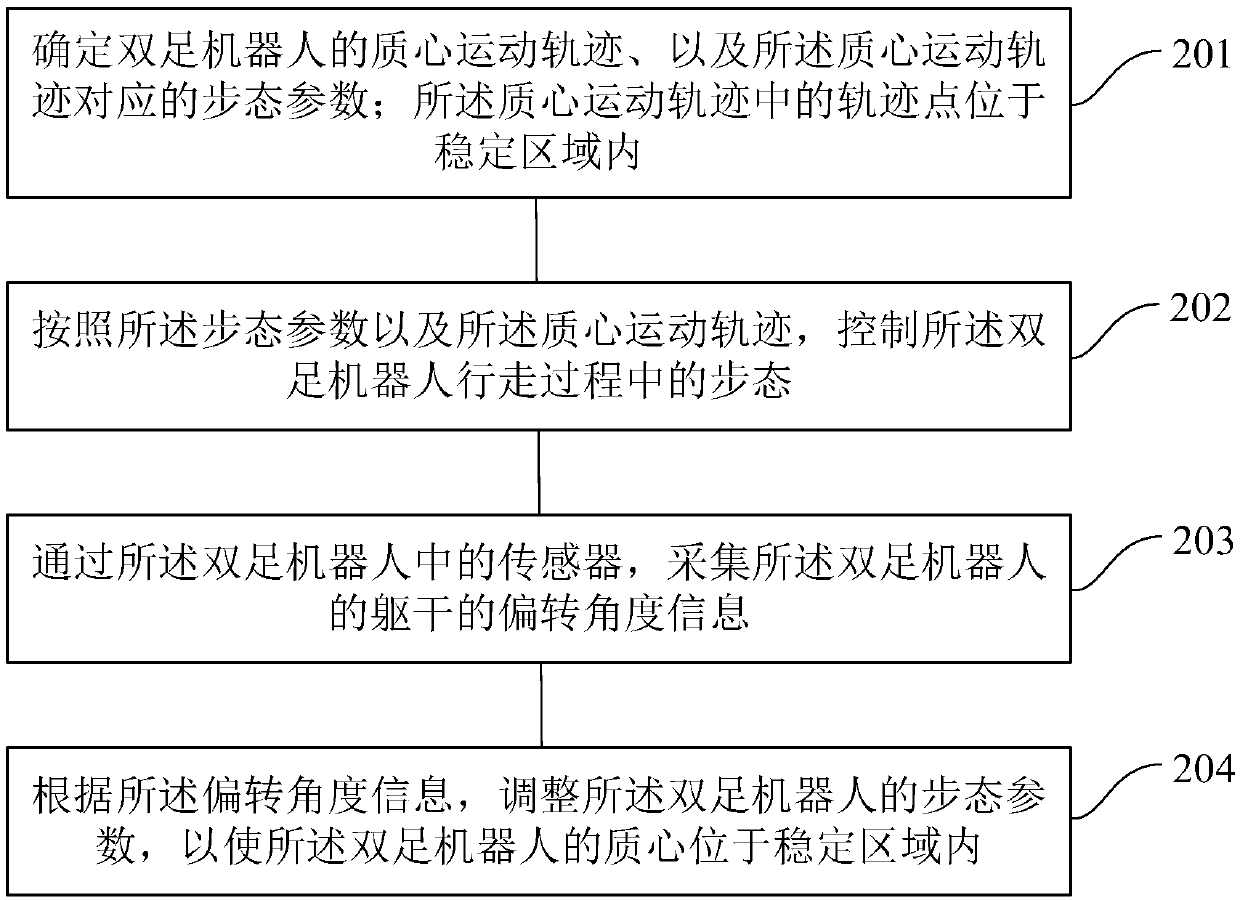
[0104] refer to figure 2 , which shows a flow chart of the steps of Embodiment 2 of a gait control method of the present invention, which may specifically include:
[0105] Step 201. Determine the trajectory of the center of mass of the biped robot and the gait parameters corresponding to the trajectory of the center of mass; the trajectory points in the trajectory of the center of mass are located in a stable area;
[0106] In the embodiment of the present invention,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com