

Error-controllable circular arc transition type smooth track generation method of four-axis industrial robot
An industrial robot, arc transition technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem of not having high continuity and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and examples of implementation. It should be understood that the specific implementation cases described here are only used to explain the present invention, and are not intended to limit the present invention.
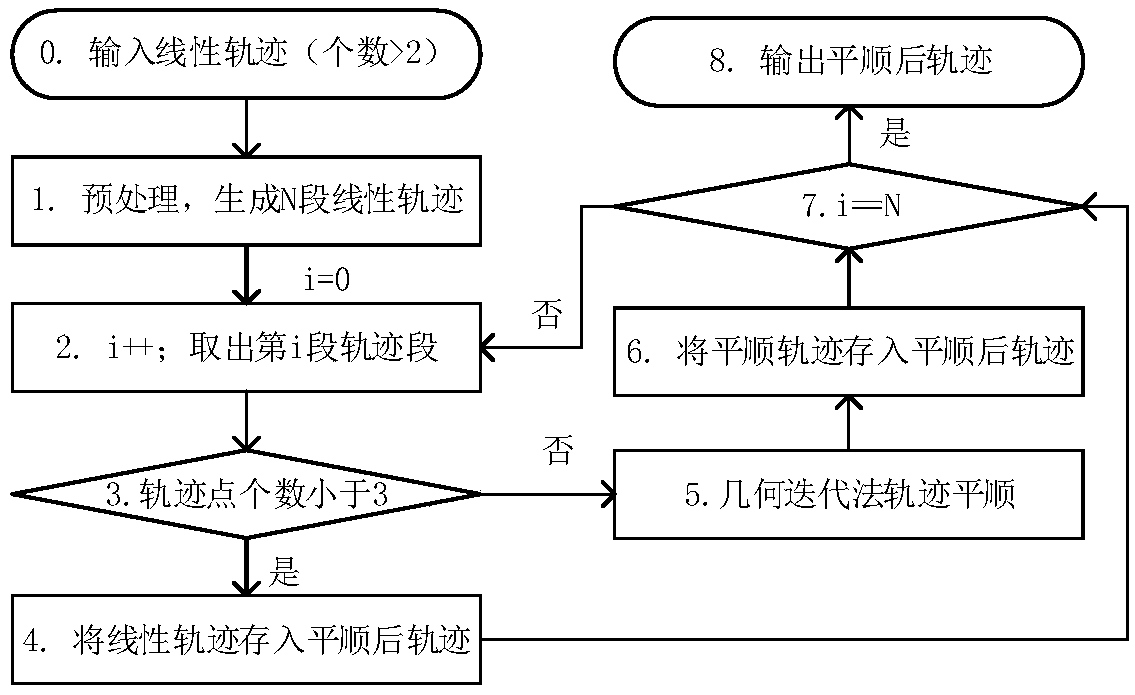
[0045] The present invention is an error-controllable four-axis industrial robot arc transition type smooth trajectory generation method, the main flow chart of which is attached figure 1 As shown, it mainly includes two main steps of preprocessing and trajectory smoothing:
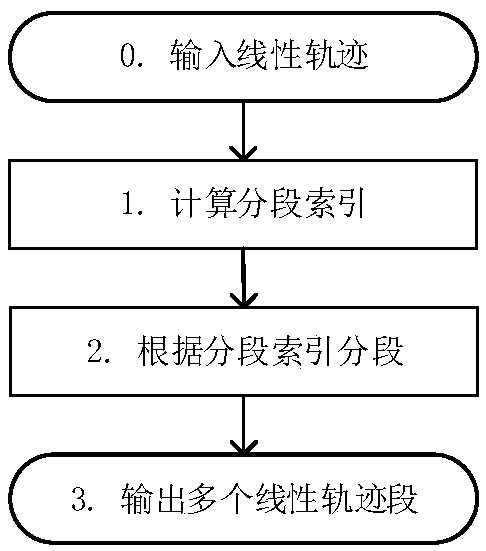
[0046] Step 1. Trajectory preprocessing of the four-axis industrial robot: Divide the linear trajectory into a segment that needs to be smooth and a segment that does not need to be smooth according to the position distance and included angle; Divide the entire trajectory into several ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More