

A depth image high-precision restoration method based on boundary capture
A depth image and repair method technology, applied in image enhancement, image analysis, image data processing, etc., can solve problems such as inapplicability of mechanical product assembly scenes, affecting depth image accuracy, and reducing depth image accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0059] The technical solutions in the embodiments of the present invention will be described clearly and in detail below in conjunction with the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0060] The technical scheme that the present invention solves the problems of the technologies described above is:
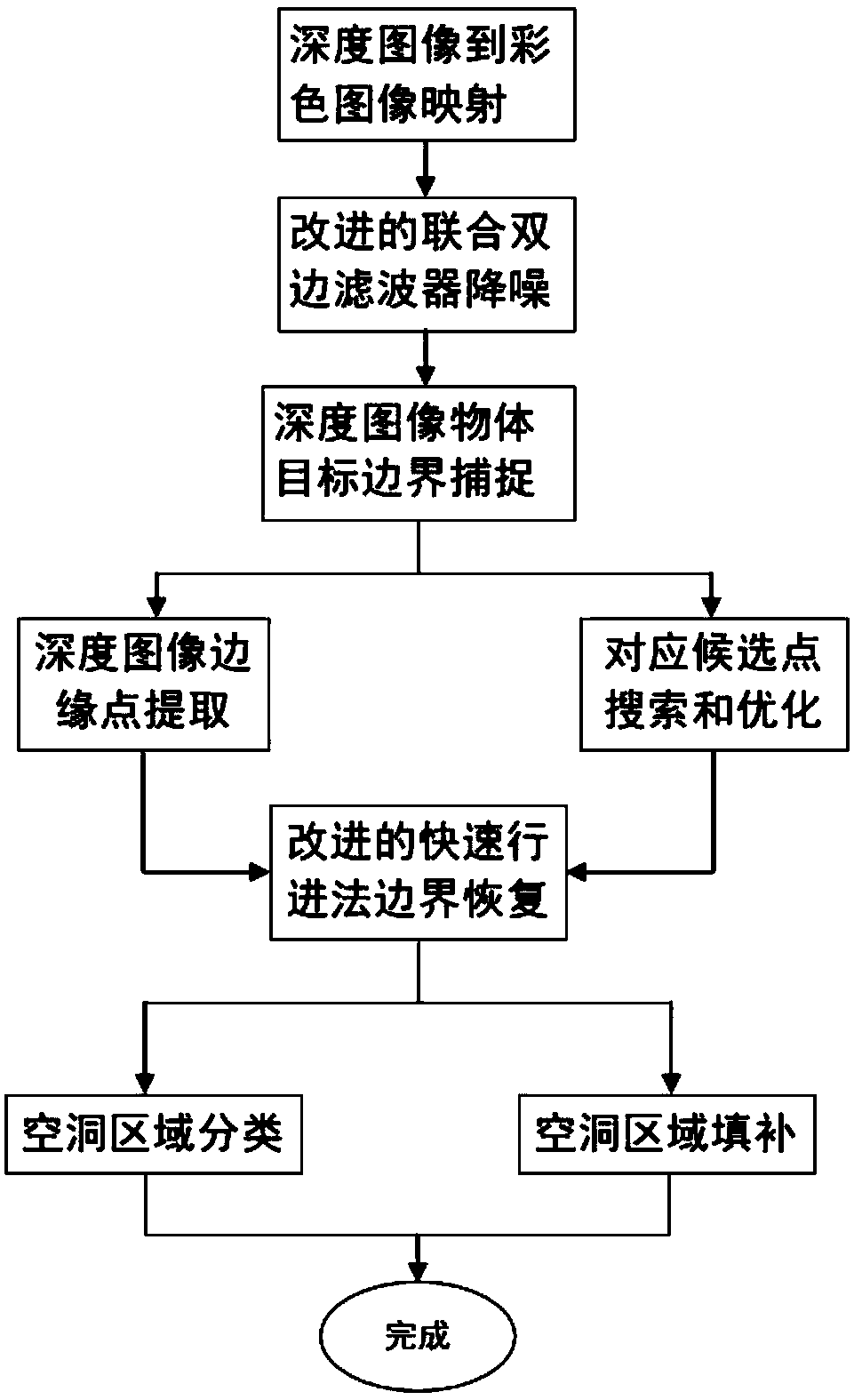
[0061] The present invention proposes a depth image restoration method based on boundary capture with the help of color image information collected by a depth sensor. This method first designs a parallel registration method of depth image and color image, so as to quickly complete the acquisition of the depth value of each pixel in the color image. Secondly, on the basis of the joint bilateral filter, the noise kernel function and the subordinate kernel function are introduced to denoise the depth image, and then the depth image and the color image have similar object boundaries, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More