

Automatic ship control system and method with reliance on heading signal
An automatic steering and ship technology, applied in general control systems, control/adjustment systems, instruments, etc., can solve the problems of inability to guarantee the accuracy and safety of ship manipulation, unsuitable for long-distance sailing, increasing labor intensity, etc. problem, to achieve the effect of optimizing the automatic control method of the ship, reducing useless voyage distance, and reducing the intensity of manual work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036]The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings. It should be noted here that the descriptions of these embodiments are used to help understand the present invention, but are not intended to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below may be combined with each other as long as they do not constitute a conflict with each other.
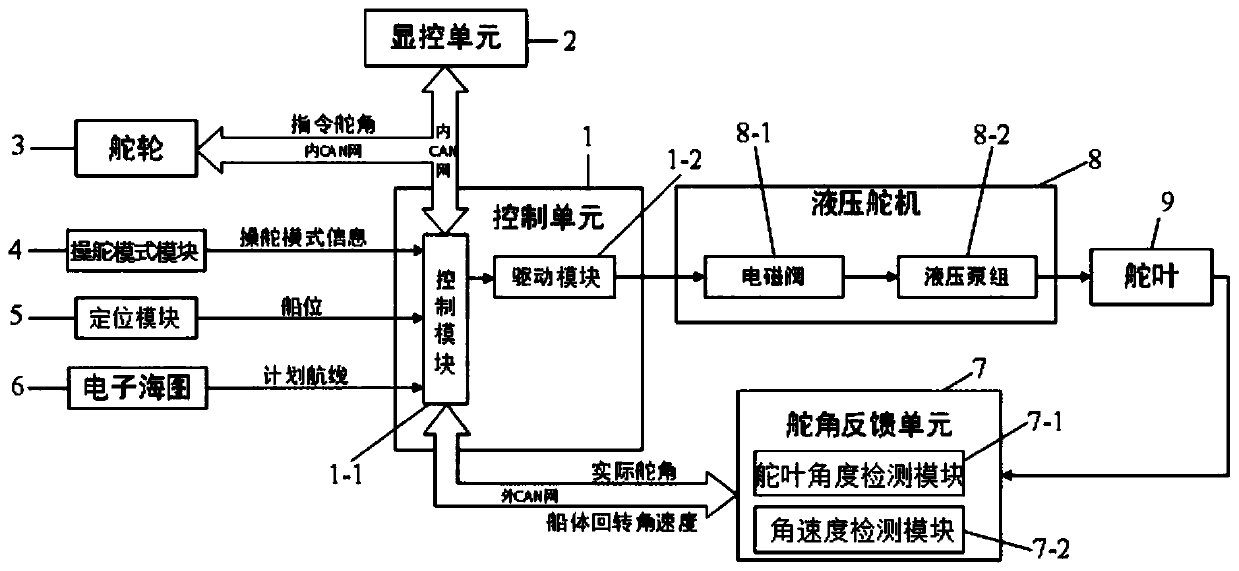
[0037] Such as Figure 1-6 As shown, the present invention provides a ship automatic steering system that does not rely on heading signals, including
[0038] The steering wheel 3 is used to output the command rudder angle to the control unit;
[0039] The positioning module 5 is used to obtain real-time ship position information and output it to the control unit;
[0040] The rudder angle feedback unit 7 is used to detect in real time the actual rudder angle of the hu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More