AGV path planning method and device based on topology map
A topological map and path planning technology, applied in road network navigators, road vehicle traffic control systems, vehicle position/route/height control, etc., can solve problems such as path planning failure, node obstacles, and path inapplicability, etc. To achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
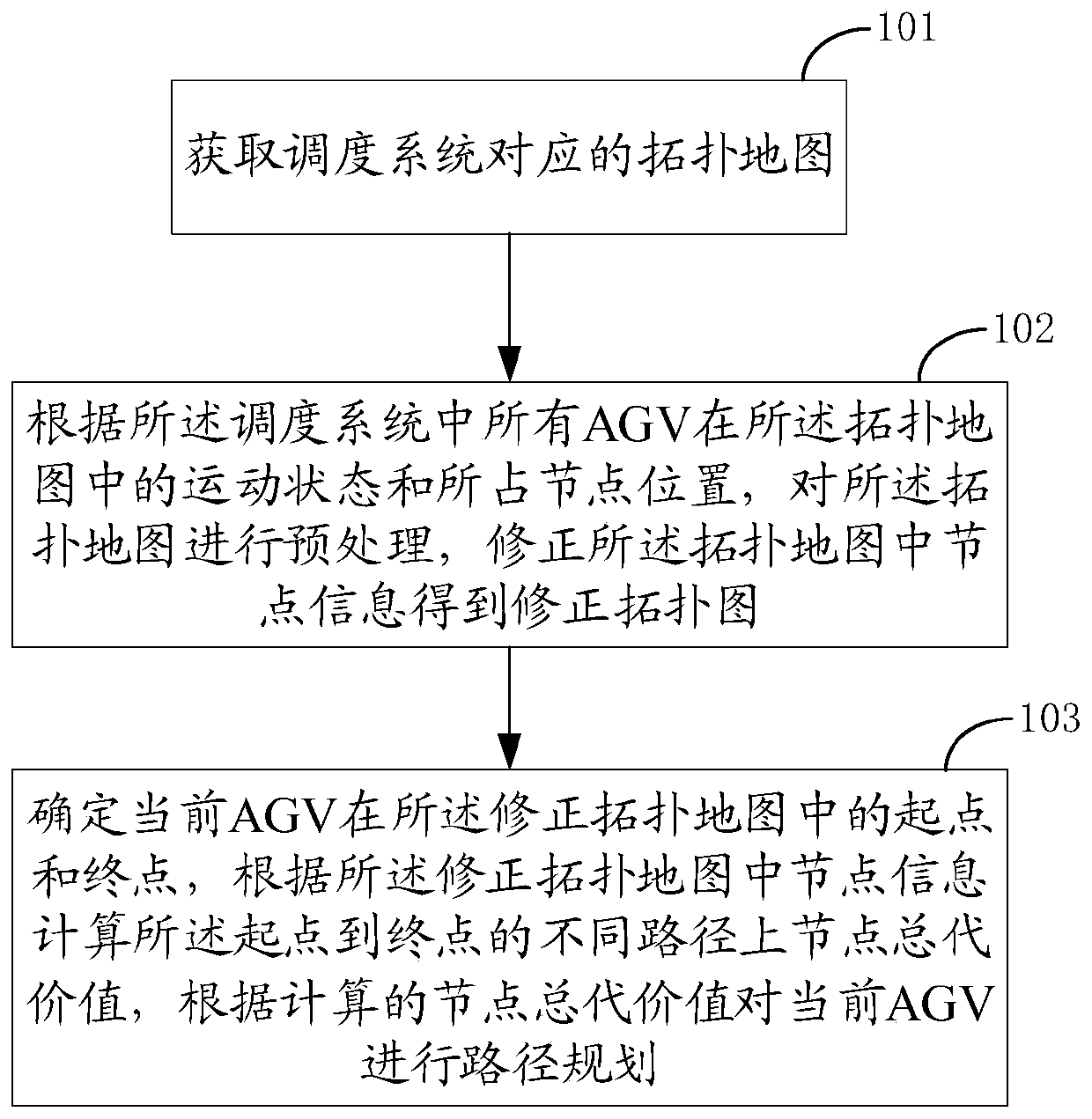
[0022] The invention provides an AGV path planning method based on topological map, such as figure 1 Shown, including:
[0023] Step 101: Obtain a topology map corresponding to the dispatch system.
[0024] Step 102: Perform preprocessing on the topology map according to the motion states and node positions occupied by all AGVs in the topology map in the scheduling system, and correct the node information in the topology map to obtain a corrected topology map.
[0025] Step 103: Determine the start point and end point of the current AGV in the above-mentioned modified topology map, calculate the total cost value of the nodes on the different paths from the start point to the end point according to the node information in the above-mentioned modified topological map, and perform the calculation of the current AGV according to the calculated total cost value of the node route plan.
[0026] In implementation, the above-mentioned topology map may be a global environment topology map or a...
Embodiment 2
[0103] Based on the same inventive concept, an AGV path planning device based on a topology map is provided in the embodiment of the present invention. For the specific implementation of the device, refer to the description of the method embodiment part, and the repetition will not be repeated.
[0104] The device mainly includes a processor and a memory, wherein the memory stores program code, and when the program code is executed by the processor, the processor is caused to perform the following steps:
[0105] Obtain the topology map corresponding to the dispatch system;
[0106] Preprocessing the topology map according to the motion states and node positions occupied by all AGVs in the topology map in the scheduling system, and correcting the node information in the topology map to obtain a corrected topology map;
[0107] Determine the start point and end point of the current AGV in the revised topology map, calculate the total cost value of nodes on different paths from the start...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com