

Low-altitude barrier avoidance method of unmanned aerial vehicle based on ultrasonic waves and binocular vision
A technology of binocular vision and unmanned aerial vehicles, applied in the direction of sound wave reradiation, radio wave measurement system, measurement device, etc., can solve the problems of inaccuracy of single ultrasonic wave and binocular vision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] specific implementation plan
[0052] In order to make the purpose, technical solution and advantages of the present invention clearer, the following in conjunction with the attached Figure 1-9 , to further describe the present invention in detail.
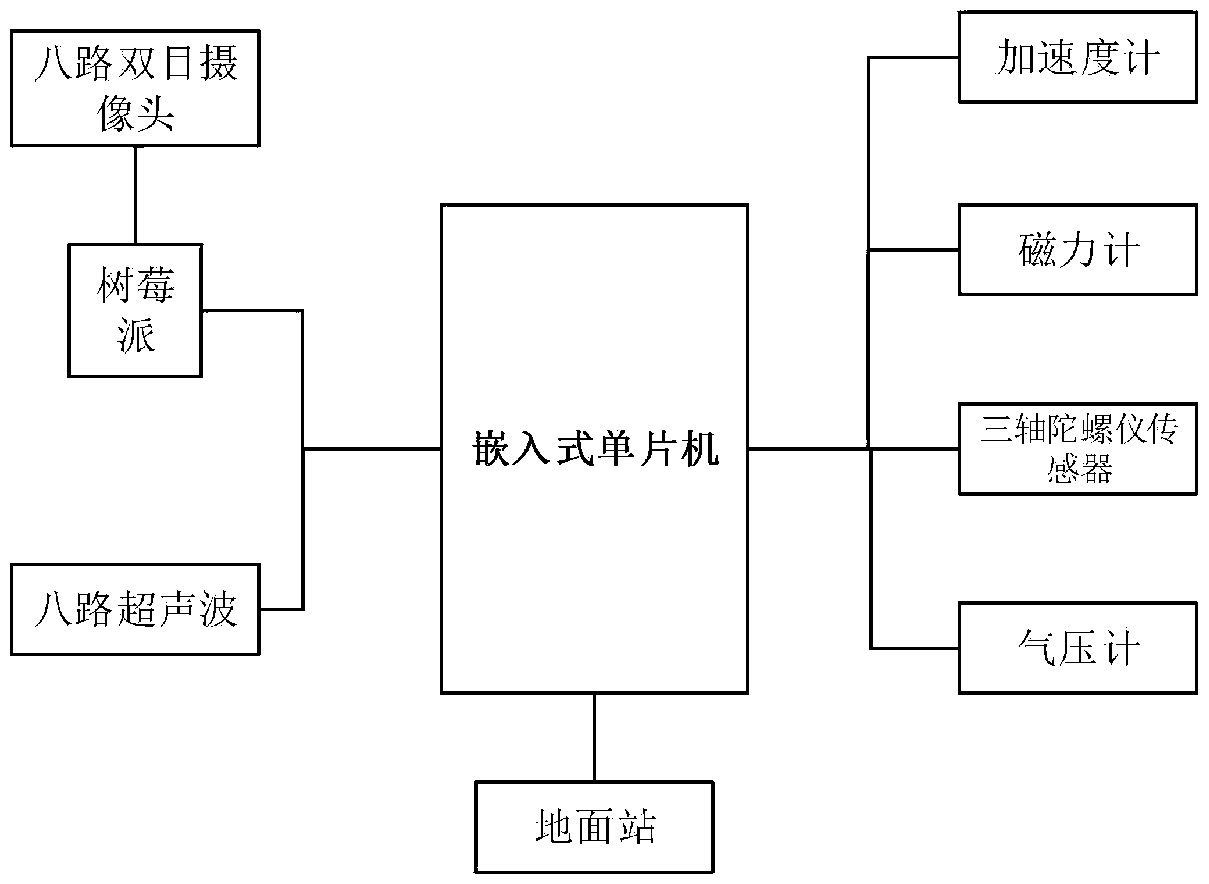
[0053] like figure 1 As shown, the present invention is a UAV low-altitude obstacle avoidance method based on ultrasonic waves and binocular vision. The UAV low-altitude obstacle avoidance system includes a UAV attitude recognition module, a flight control module, an eight-way binocular camera module and Eight-channel ultrasonic module. The attitude recognition module includes an accelerometer, a gyroscope, a magnetometer and a barometer, which are used to obtain the attitude angle (pitch angle, roll angle and yaw angle) and height of the drone itself. The flight control module is mainly an embedded single-chip microcomputer and a ground station, which control the flight attitude of the drone.
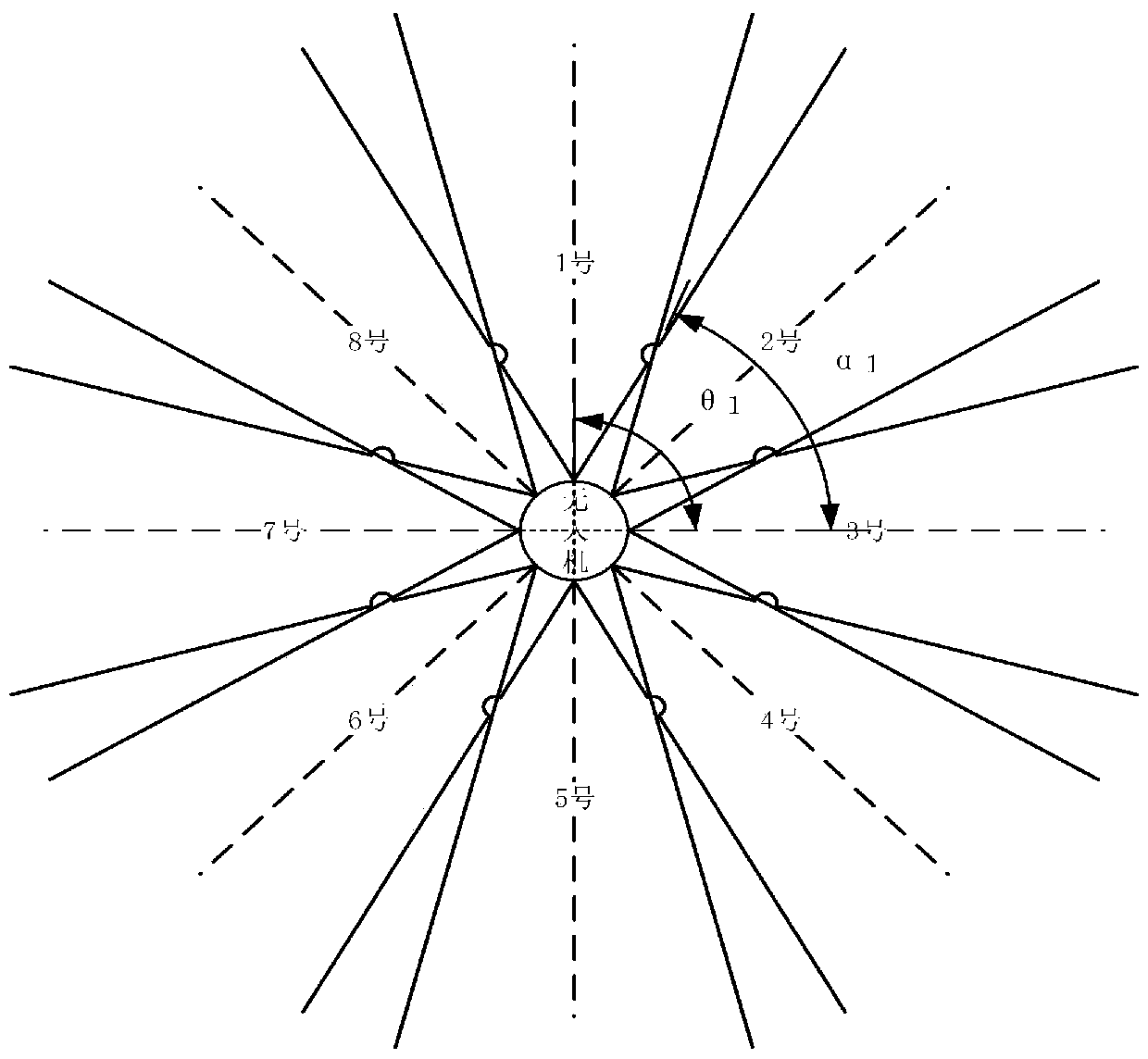
[0054] like figure 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More