

Multi-rotor unmanned aerial vehicle cloud deck obstacle avoidance system and method based on binocular vision
A multi-rotor unmanned, binocular vision technology, applied in control/regulation systems, non-electric variable control, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the purpose, technical solutions and advantages of the present invention clearer, the following is attached Figure 1-7 , Further describe the present invention in detail.
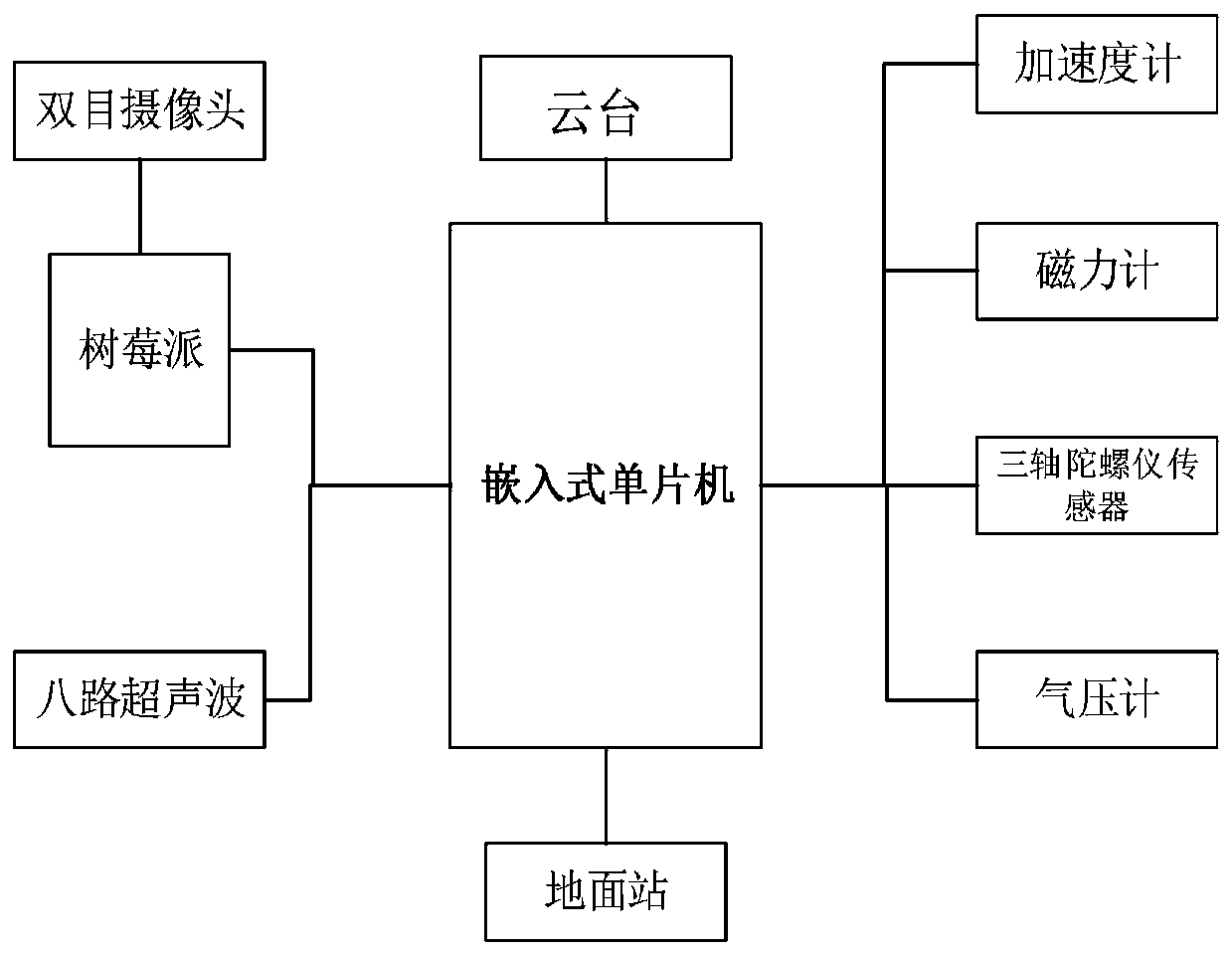
[0051] Reference figure 1 The binocular vision-based multi-rotor UAV PTZ obstacle avoidance system provided by the present invention includes a UAV attitude recognition module, an eight-way ultrasonic module, a binocular camera module, a flight control module and a PTZ.
[0052] The binocular camera module includes a binocular camera and a raspberry pie, which is used to realize binocular obstacle avoidance. The three-axis gimbal is installed vertically below the drone, and the binocular camera is vertically installed on the three-axis gimbal. The two cameras of the binocular camera are arranged left and right and parallel to each other; the Raspberry Pi is the processing system of the binocular camera. USB is connected to the binocular camera to process the depth value of the disparity...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More