

Parallel leg structure and walking robot
A walking robot and leg technology, applied in the field of robotics, can solve the problems of reduced carrying capacity, increased overall weight, increased manufacturing cost, etc., to achieve the improvement of response speed and walking speed, improve flexibility, good flexibility and applicability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
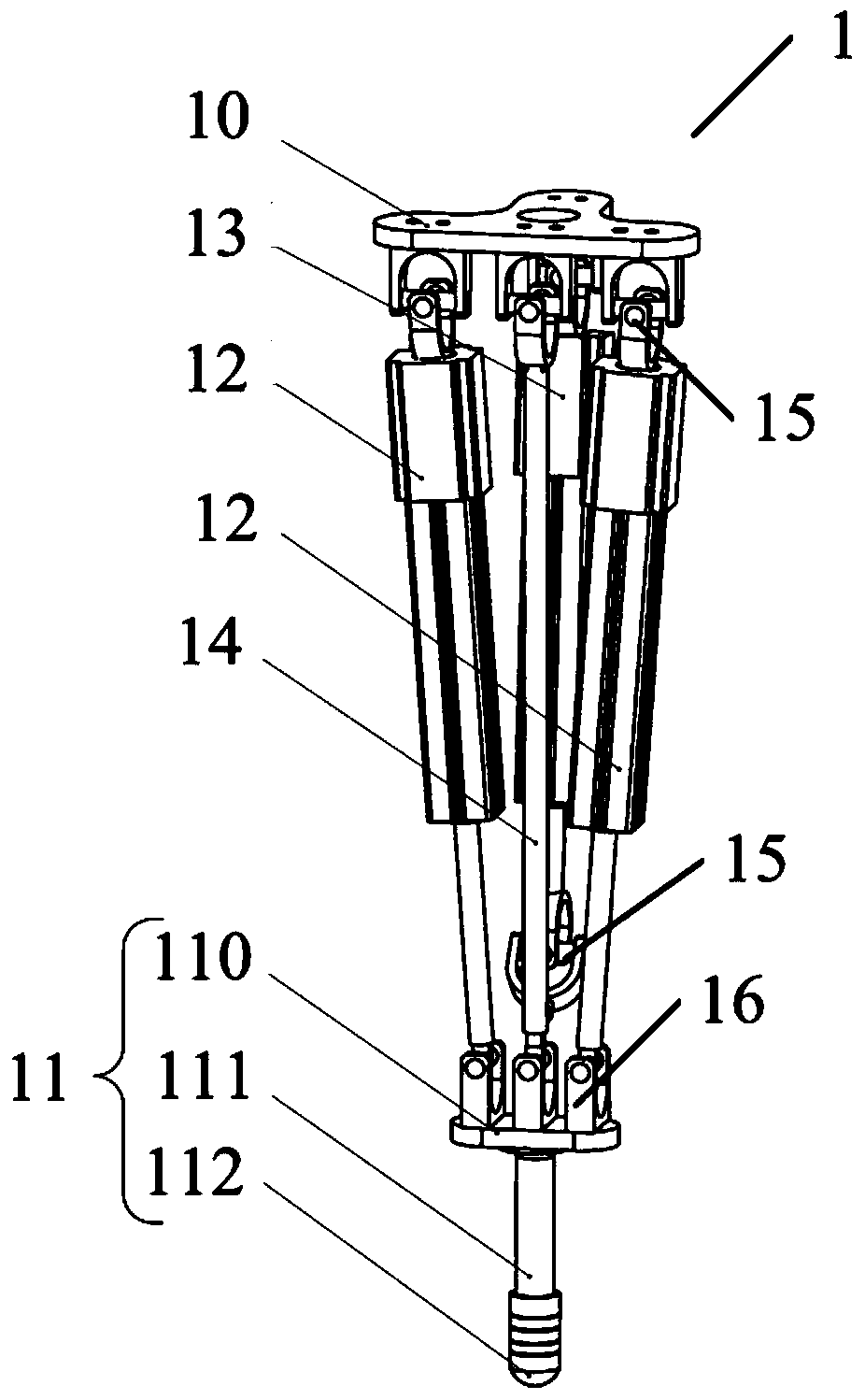
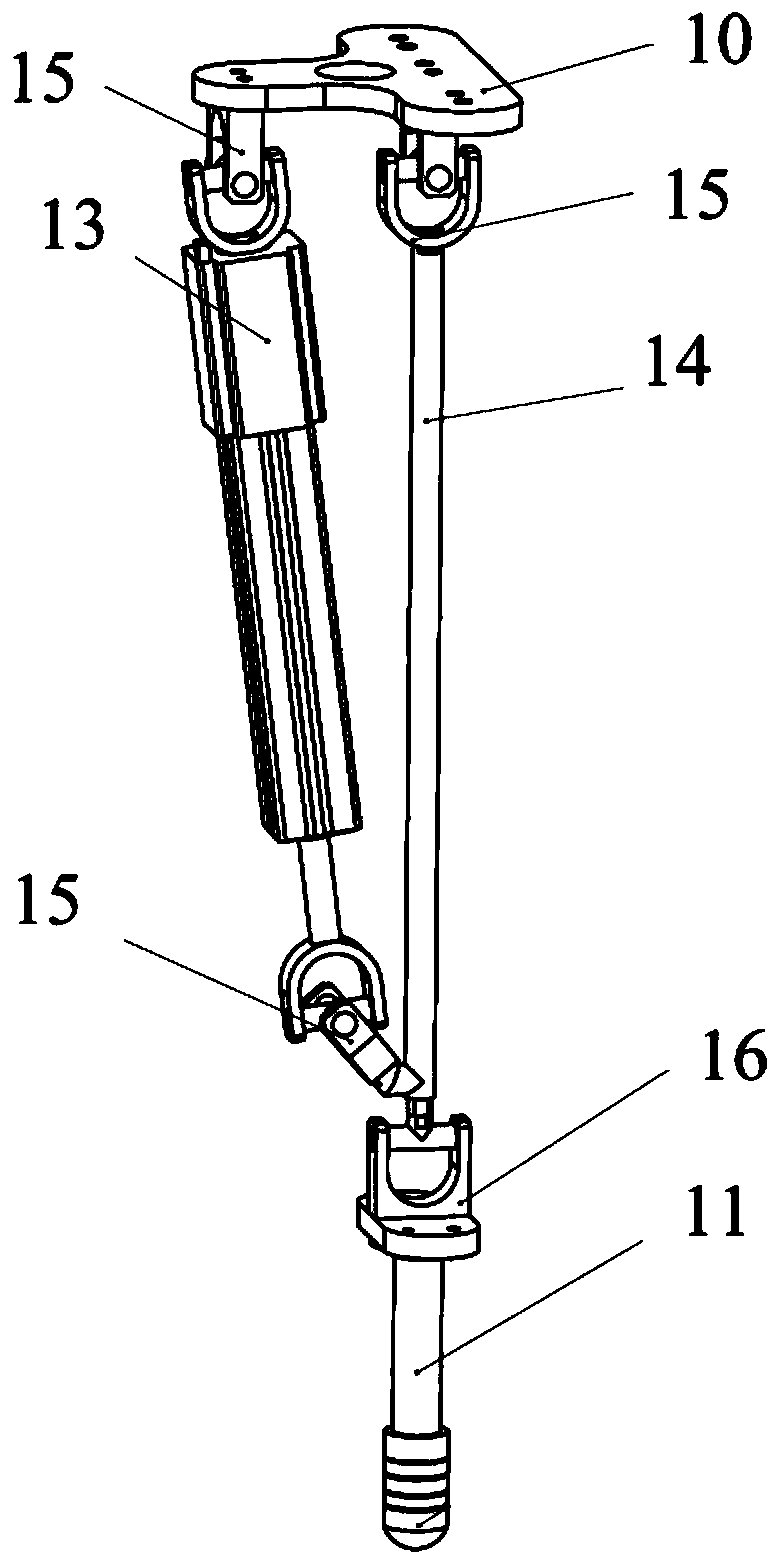
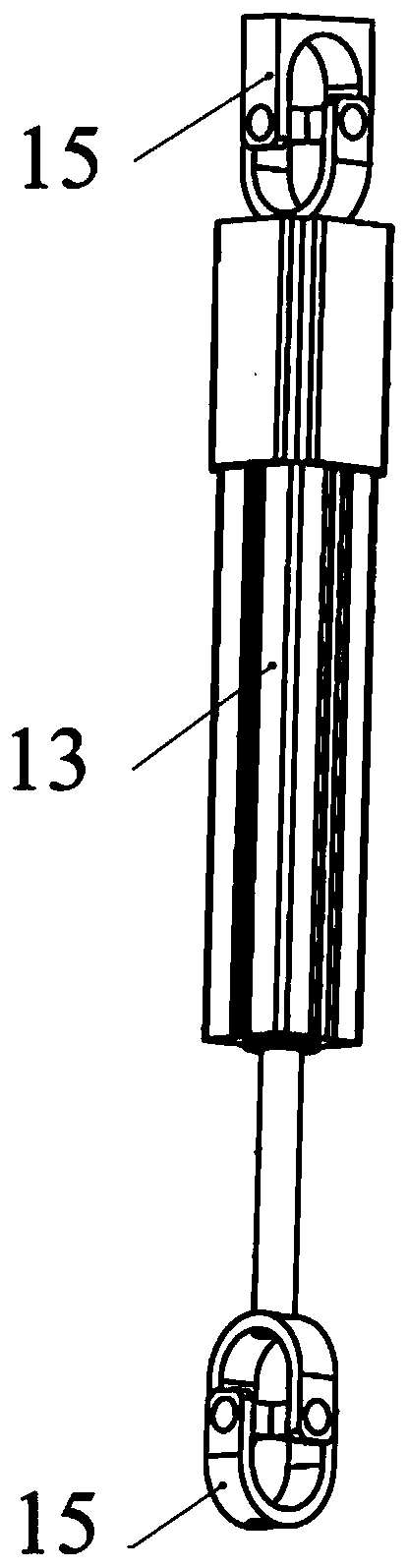
[0043] see Figure 1-Figure 5 As shown, the present embodiment provides a parallel leg structure; figure 1Schematic diagram of the structure of the parallel leg structure provided in this embodiment, figure 2 The structural schematic diagram of part of the parallel leg structure provided for this embodiment clearly shows the connection relationship between the second driving arm, the connecting rod, the static platform and the foot unit, image 3 It is a schematic structural diagram of the second driving arm of the parallel leg structure provided in this embodiment, Figure 4 It is a structural schematic diagram of the connecting rod of the parallel leg structure provided in this embodiment, Figure 5 Schematic diagram of the structure of the foot unit of the parallel leg structure provided in this embodiment.
[0044] see Figure 1-Figure 5 shown, combined with Figure 6 and Figure 7 , the parallel leg structure is suitable for walking robots.
[0045] The parallel l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More