

Flat type single-arm robot based on transmission of synchronous pulleys
A synchronous pulley, flat technology, applied in the field of robotics, can solve the problems of inability to apply to small workspaces, inability to meet high-precision positioning requirements, limited joint rotation angle, etc., to achieve easy motor maintenance and small footprint , the effect of reducing the volume
Active Publication Date: 2019-05-17
CHINA ELECTRONIC TECH GRP CORP NO 38 RES INST
View PDF10 Cites 6 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0003] The traditional SCARA robot is driven by direct drive, which has the characteristics of low price, but the motor is located in each joint, and the cable routing makes the rotation angle of the joint limited; the vertical space of the end arm is large and cannot be used in the working space Smaller occasions; the direct drive transmission method makes the end of the robot vibrate greatly, which cannot meet the occasions with high-precision positioning requirements, such as wafer loading and unloading
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 2
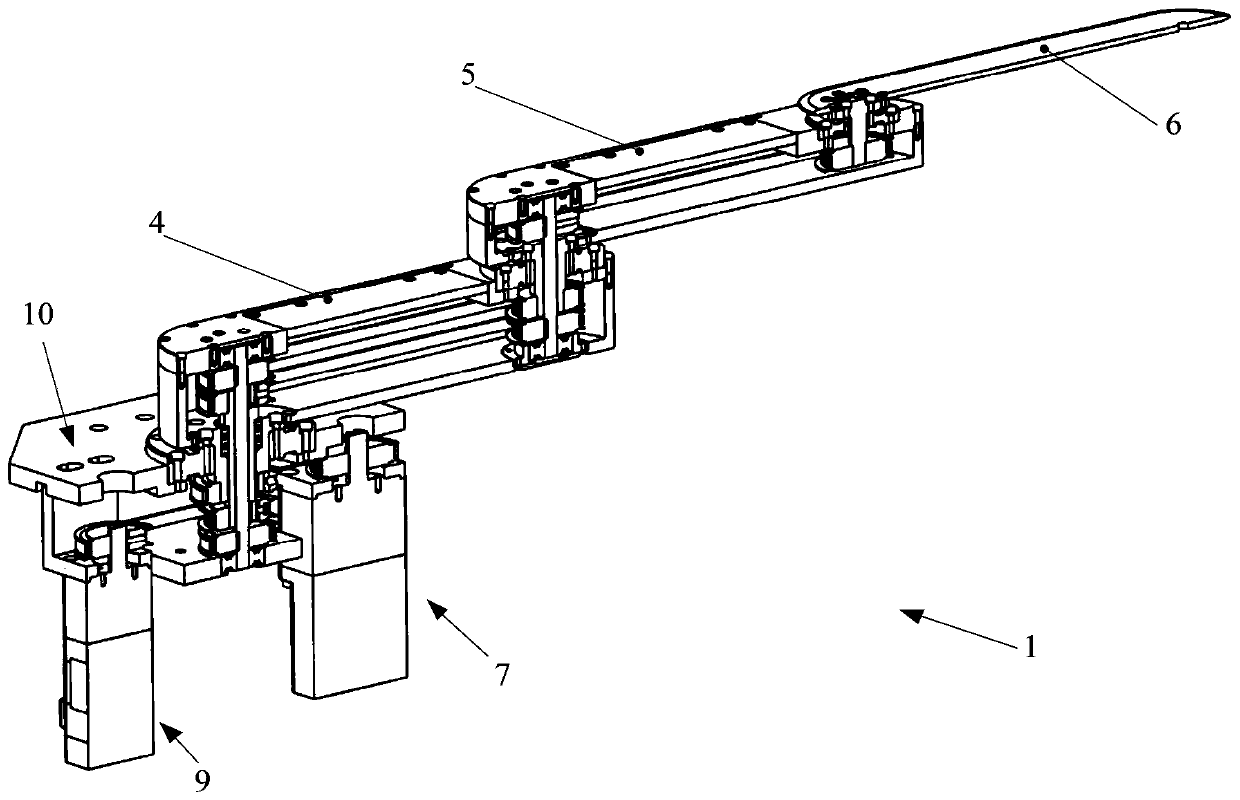
[0040] The difference between this embodiment and the first embodiment is that the forearm motor 7a, the middle arm motor 8a, and the end arm motor 9a all use servo motors.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
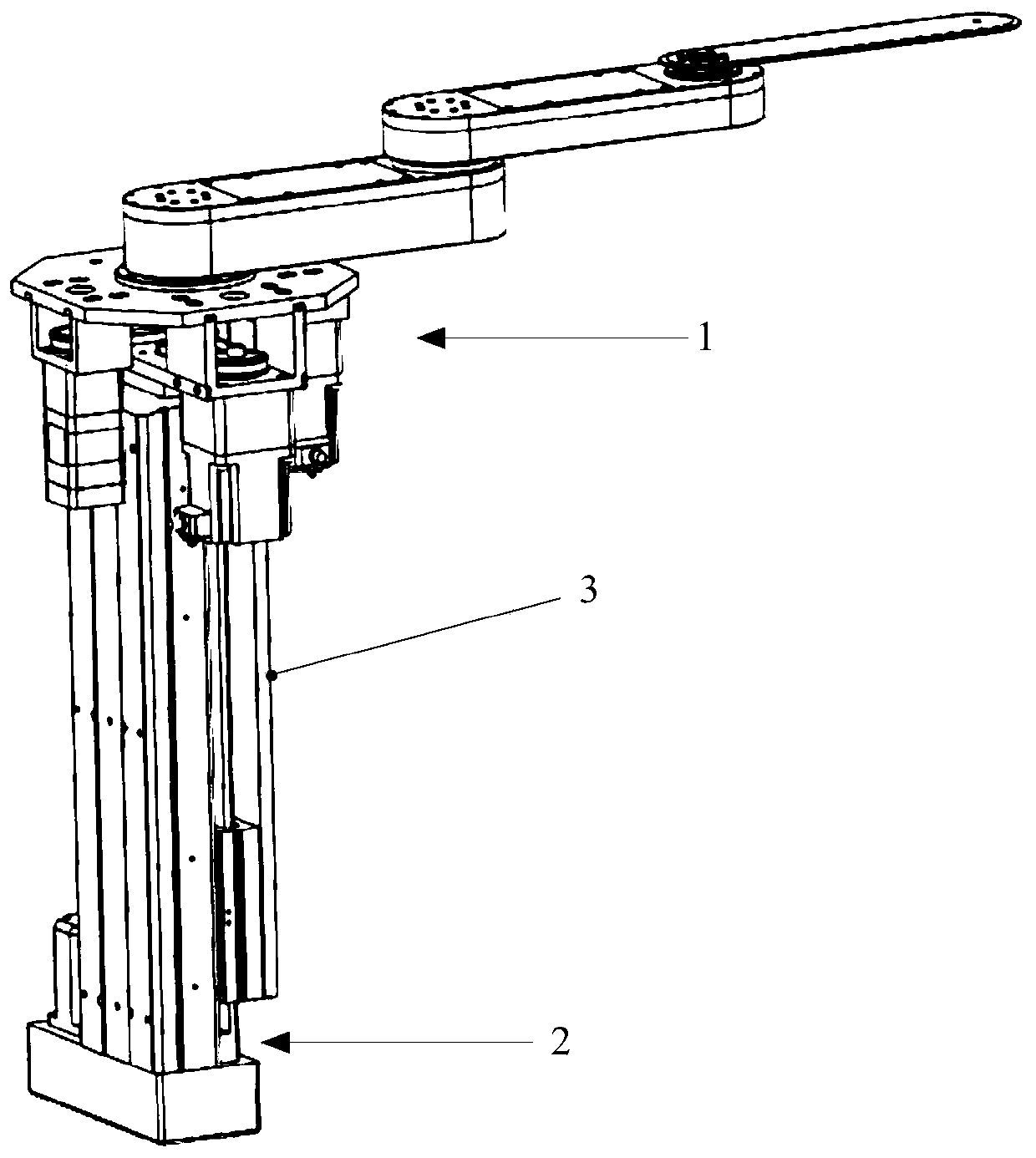
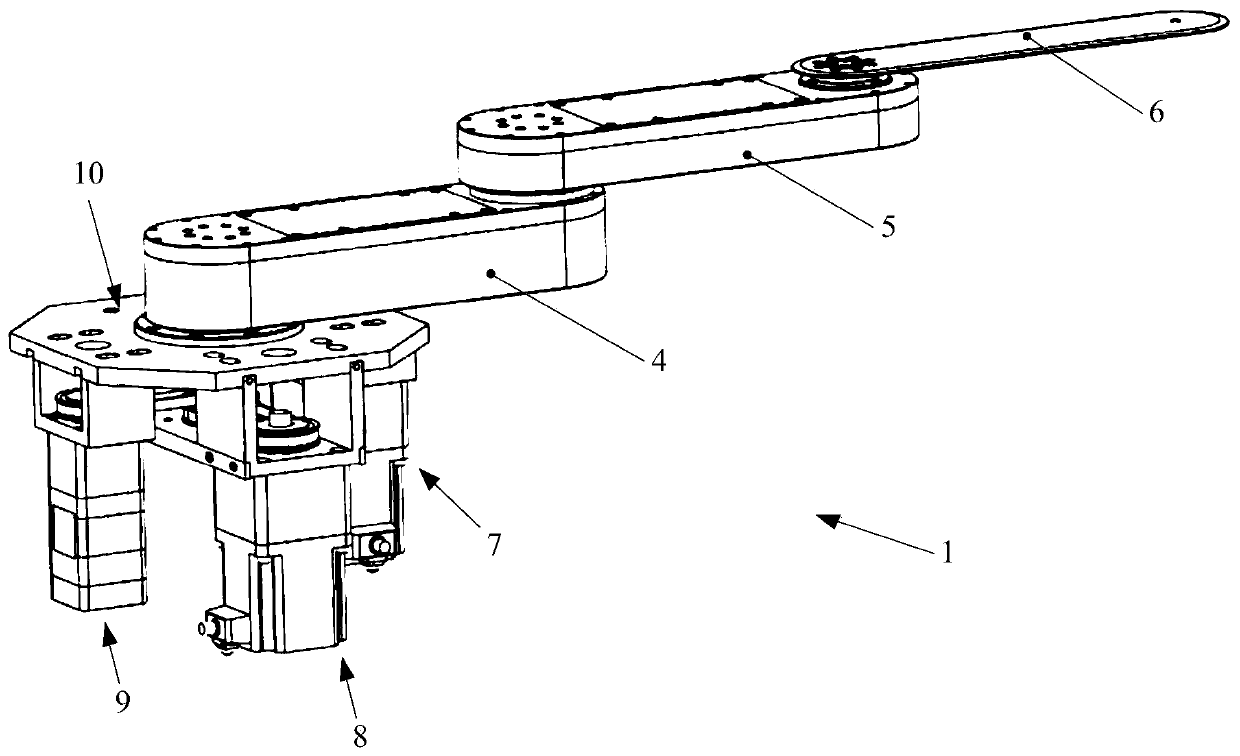
The invention discloses a flat type single-arm robot based on transmission of synchronous pulleys and relates to the field of robots. The flat type single-arm robot comprises an SCARA mechanical arm.The SCARA mechanical arm comprises a front arm, a middle arm, a tail arm, a front arm transmission mechanism, a middle arm transmission mechanism and a tail arm transmission mechanism. The front arm,the middle arm and the tail arm are arranged sequentially from front to back. The front arm transmission mechanism is a one-level transmission mechanism, and an output shaft of a motor of the front arm transmission mechanism is connected with a rotary shaft of the front arm through one set of synchronous pulleys. The middle arm transmission mechanism is a two-level transmission mechanism, and an output shaft of a motor of the middle arm transmission mechanism is connected with a rotary shaft of the middle arm through sequential transmission of two sets of synchronous pulleys. The tail arm transmission mechanism is a three-level transmission mechanism, and an output shaft of a motor of the tail arm transmission mechanism is connected with the tail arm through sequential transmission of three sets of synchronous pulleys. The flat type single-arm robot has the advantages that the rotary angle of the mechanical arm is not limited, and the size of the mechanical arm is reduced.
Description
technical field [0001] The invention relates to the field of robots, in particular to a flat single-arm robot based on synchronous pulley transmission. Background technique [0002] The planar articulated SCARA robot has three degrees of freedom in rotation and one degree of freedom in the vertical direction. It can quickly locate and complete specified tasks in the horizontal plane. It is especially suitable for assembling printed circuit boards and electronic components, moving and picking up integrated circuit boards, etc. Work, is widely used in plastics industry, automobile industry, electronics industry, pharmaceutical industry and food industry and other fields. [0003] The traditional SCARA robot is driven by direct drive, which has the characteristics of low price, but the motor is located in each joint, and the cable routing makes the rotation angle of the joint limited; the vertical space of the end arm is large and cannot be used in the working space Smaller oc...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): B25J9/06B25J9/10B25J9/12B25J17/00B25J18/04
Inventor何张强胡祥涛张腊梅李旺徐非骏吴后平时宇航程五四李赞澄赵晖陈帝江
OwnerCHINA ELECTRONIC TECH GRP CORP NO 38 RES INST